 Add this page to your book
Add this page to your book  Remove this page from your book
Remove this page from your book  Manage book (
Manage book ( Help
Help Table of Contents
NMEA 2000 & MFD integration guide
1. Introduction
1.1 Summary
This document explains how to integrate a Victron system onto a marine MFD also known as a chart plotter. Compatible brands include Garmin, Raymarine, the Navico brands B&G, Simrad and Lowrance as well as Furuno.
There are multiple options, and how to best integrate depends on the customer requirements, preferred MFD brand and model as well as used Victron components.
Make sure to closely read this full document to find the best method for your type of system.
 Picture showing the two integration options, NMEA2000 and HTML5 App. Click to see full size and see the difference between the two.
Picture showing the two integration options, NMEA2000 and HTML5 App. Click to see full size and see the difference between the two.
1.2 What is NMEA 2000?
NMEA 2000 is a communications standard used for connecting marine sensors and display units within ships and boats.
Victron Energy is a member of the NMEA 2000 organisation, and we have several of our products certified by NMEA 2000.
NMEA 2000 is sometimes also refered to as N2K, for brevitiy.
1.3 What is the MFD HTML5 App?
The MFD HTML5 App is a simple to install and setup integration into all main marine MFD brands, including Raymarine, Garmin, Navico and Furuno. Truly plug-and-play: once the Victron GX Device and the MFD are connected via ethernet, a Victron logo will appear in the App menu of the MFD. Behind that button, there is a page to monitor and control the Victron Energy system. The information on screen automatically adapts to the installed Victron system.
1.4 Other integration options
This document only covers integration via NMEA2000 as well as the MFD HTML5 App. There are two other alternatives, commonly used to integrate Victron equipment in a Marine applications.
First of all Modbus-TCP. Typically used on larger vessels, Modbus-TCP is a protocol commonly used for (custom) designed SCADA systems. The Victron GX devices all support the Modbus-TCP protocol. More information in the GX Modbus-TCP Manual.
The other alternative is SignalK. More information about that in the Venus OS Large manual. Do take note of the contents of the Support chapter.
2. Integration details
2.1 Systems with a GX Device
For most installations and integrations, it will be best to use one of our GX Products. It acts as a hub, collecting information from connected equipment, such as Inverters, Battery Monitors and Chargers; and then making them available to the MFD.
The GX devices offer both above introduced integration options: NMEA2000 as well as the Victron HTML5 App.
The HTML5 integration is available for Raymarine, Garmin, Furuno and Navico brands: B&G, Lowrance and Simrad. Click those links to go straight to all information, videos and manuals.
When connected to the onboard NMEA2000 network, the GX Device can read data from the network (tank level and GPS information). Also it can make data from Victron devices connected to the GX Device available on the NMEA2000 network. That latter feature is called NMEA2000-out, more information in the NMEA 2000-out chapter in the Cerbo GX manual.
Both the NMEA2000 and HTML5 App/Ethernet connections can be made and used at the same time.
Each has its advantages and disadvantages, and together they complement each other:
The MFD HTML5 App is the simpler one to setup as its plug and play. It presents an easy to use system overview without requiring any configuration. The system overview shown will automatically adapt to the type of Victron system installed. The (only) available configuration is defining the batteries as well as giving them names.
The NMEA 2000 integration is more complex, and allows more customisation on the MFD: the data will show up in the data-tree of the MFD, and most MFDs then allow the user to configure various pages and combinations of information.
As mentioned above, a GX Device can also read tank level data from NMEA 2000. More information in the the Installation chapter of the GX manual.
2.2 Products with a VE.Can port
All Victron products that feature a VE.Can port can be directly connected to the NMEA 2000 network, using the VE.Can to NMEA2000 cable.
- Skylla-i 24V Battery Chargers
- Skylla IP65 Battery Chargers
- Lynx Shunt VE.Can Battery Monitor
- Lynx Smart BMS
- SmartSolar MPPT Solar Chargers with VE.Can communications port

2.3 Tank monitoring integration
The GX devices can measure tank levels, and make the resulting data available on the NMEA2000 network. Also, they can read tank level data from the N2K network.
Below sections explain the details of each integration type.
Integration A) GX Device to MFD and NMEA2000
Some of Victron GX monitoring products feature built-in tank level inputs. For example the Cerbo GX, which is the most common GX device, has four inputs that can take a resistive tank level sender.
Also, all GX devices can also have their number and types of tank level inputs expanded by adding one or multiple GX Tank 140 modules. It has four inputs, of which each can be configured to measure either voltage (0-10V) or current (4-20mA).
All tank level inputs feature customisable naming, setting a type (fresh water, fuel, black water and more), configurable filtering and damping settings as well as setting up a custom tank shape for non-square tanks.
The GX Device can transmit the resulting tank levels to the NMEA2000 network. See the NMEA2000-out chapter in the GX manual for information on how to set that up. Note that the MFD HTML5 App does not include showing tank levels.
Integration B) NMEA2000 to GX Device and VRM Portal
The other way around is possible as well: the Victron system reading tank level data from NMEA2000.
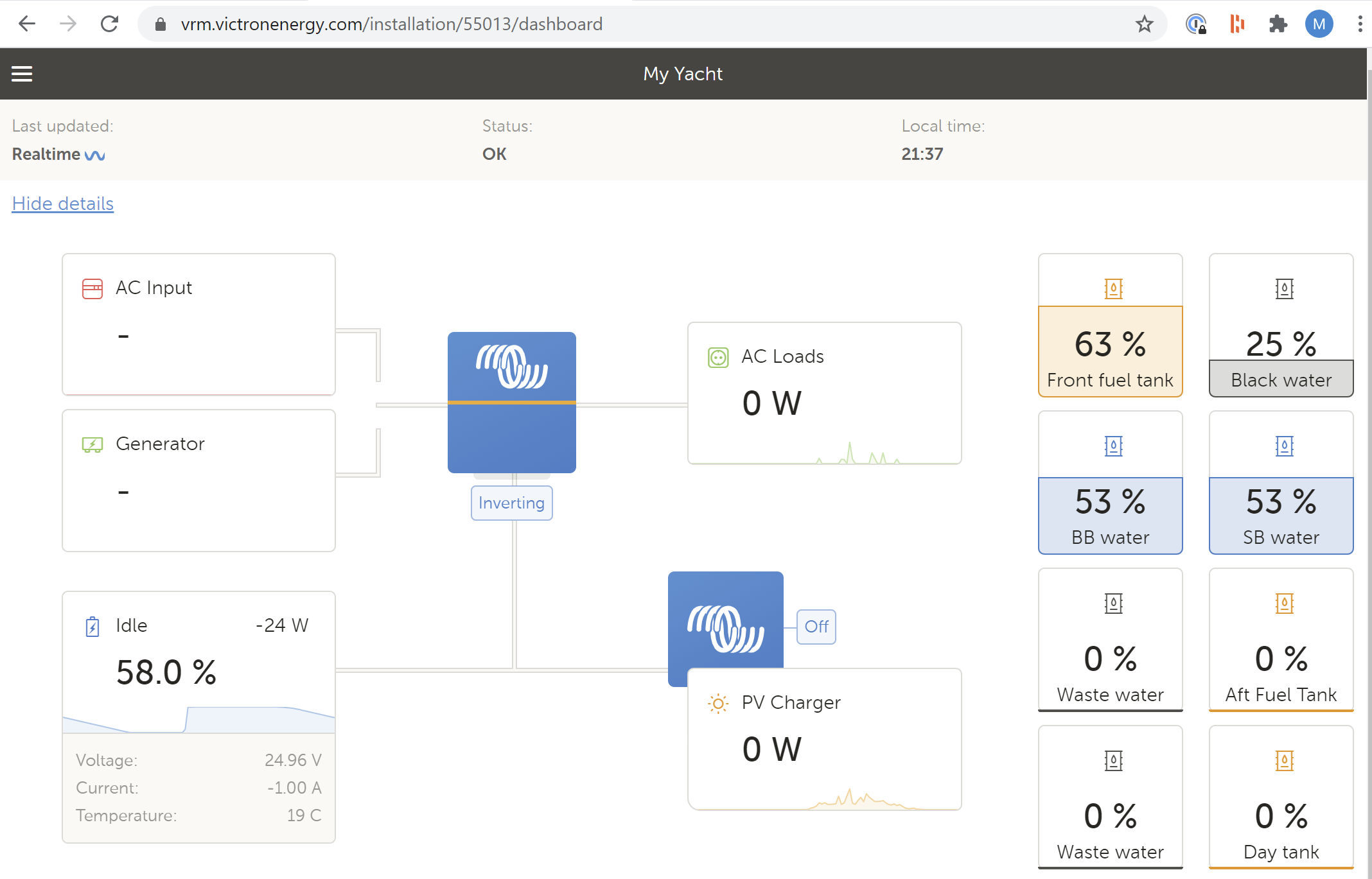
The tank data will be shown in the GX device user interface as well as on the VRM Portal. Screenshots below.
Compatible tank senders are listed in the GX manual, installation chapter.
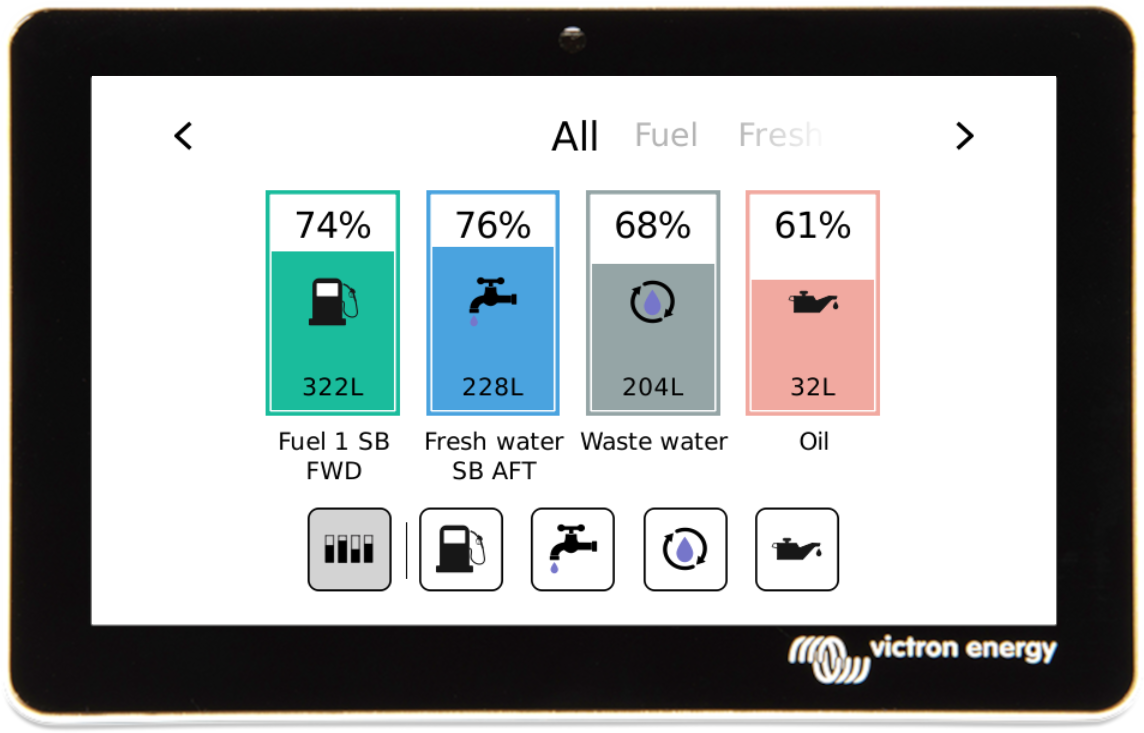
Above picture: GX Touch 50, showing multiple tank levels. Coming from either the NMEA2000 network, directly connected resistive tank senders or via the GX Tank 140 accessory.
Below screenshot shows a similar system, but then on the VRM Portal.
2.4 NMEA 2000 GPS integration
Our GX devices can read location, altitude, speed and course from the NMEA2000 network. For details, see the GX manual.
Note the other way around does not work. A GX Device which has a USB GPS installed does not emit GPS data out onto the NMEA2000 network as part of the NMEA2000-out function.
2.5 Using our converter interfaces (DEPRECATED!)
- VE.Direct to NMEA 2000 interface, for BMV Battery Monitors (only).
Note that the use of both those interfaces is deprecated. Use a GX device instead.
3. NMEA2000 Details
3.1 PGN Lists
Refer to our Datacommunication whitepaper, page 8 and beyond, for a list of Victron products and their supported PGNs.
3.2 NMEA 2000 instancing
NMEA 2000 Instances are used to identify multiple similar products connected on the same network.
There are several types of instances, the most important ones being the Device instance as well as the Data instances.
More information about instances is in the NMEA2000 chapter in the GX manual.
What settings need to be made? For example instances?
That is a commonly asked question. The answer depends on the used brand of MFD:
For Garmin, Furuno, Maretron and Navico (B&G, Lowrance, Simrad) systems: none. No instances, also not data instances such as the DC Detailed instance, need to be changed. It all works out of the box, other than configuring what field to show where on the MFD.
For Raymarine, you might need to do some configuration: for systems with a SmartShunt and a SolarCharger, or multiple SmartShunts, or a Lynx Smart BMS, the data instances need to be configured to be unique. More information about that in the Victron & Raymarine document, in the last chapter.
3.3 Terminators and network layout
A N2K CAN-bus network needs to be laid out as in a backbone configuration, using drop cables to connect to each device. Also, there should be only two terminators in the network. Therefore:
- Use the NMEA 2000 cable as the backbone.
- Run a separate drop cable separately to each Victron device VE.Can to NMEA 2000 cable
- Only terminate the NMEA 2000 backbone. Do not install a terminator in any of the VE.Can ports on the Victron products.
Or:
- Have the N2K network on one side, with one terminator. On the other end, change to the Victron network, with also one (Victron) terminator at the end.
The first option is more aligned with the official N2K method. But, in case of multiple Victron products that need to be connected to the N2K network, will require more wire runs and definitively more NMEA2000 to VE.Can conversion cables.
3.4 DC Voltage compatibility
The Victron VE.Can network accepts 9 to 70VDC.
The NMEA-2000 network used to be 9 to 16VDC, which is, or will be, expanded to also include 24V. Which means that some NMEA-2000 devices are 9 to 16VDC, some are 9 to 30VDC, and some allow higher voltages.
Also, the Victron VE.Can network will (in most cases) be powered with battery voltage. So for a 48V system, the voltage on the VE.Can network exceeds the NMEA-2000 accepted voltage levels.
Therefore, it is important to not connect those power cables.
The Victron cable used to connect both networks together, the VE.Can to NMEA 2000 cable, has a removable fuse which is to be removed in case separation is necessary. A printed warning label is attached to the cable to warn about this.
3.5 Further reading on Victron and NMEA 2000
4. Varia
4.1 Raymarine & EmpirBus
Besides using NMEA 2000 and/or the Lighthouse App, integration onto Raymarine MFDs can also be done with an Empirbus NXT MCU . Though both are connected to the same N2K network, the NXT MCU translates the N2K PGNs originating from the Victron equipment into Raymarine proprietary messages.
In the EmpirBus Studio software you will find dedicated Victron building blocks than can be drawn onto the diagram.
Next, use the EmpirBus Graphical tool to design the pages for on the Raymarine MFDs.
The EmpirBus system requires the data instance of battery status and dc detailed status to be unique when using multiple sources. (how to change data instances)
4.2 Maretron
All data sent out by Victron devices on the N2K network can be picked up by the Maretron MFDs & software. See the Maretron N2KView® vessel monitoring and control software.
5. FAQ
Q1: Can/must both Ethernet and and N2K connection be made between Victron GX and MFD?
Both can be made at the same time.
Ethernet is needed to get the MFD App, as explained above.
And an N2K connection is needed to get data to show in other fields on the MFD.
See annotated screenshot above for which is what.