22. Anhang
22.1. RV-C
22.1.1. Einführung in RV-C
Das GX-Gerät bietet Integration mit einem RV-C-Netzwerk. Die Integration ist in zwei verschiedene Typen unterteilt:
RV-C out: Das GX-Gerät überträgt Daten an das RV-C-Netzwerk, wo sie von angeschlossenen Displays und Kontrollzentren gelesen werden können. Dazu gehören Daten von Wechselrichtern/Ladegeräten, Batterieladegeräten, Solarladegeräten, Batterien und mehr.
RV-C in: Das GX-Gerät liest Daten aus dem RV-C-Netzwerk, um sie dem Benutzer anzuzeigen (Tankfüllstand) und zu steuern (Lithionics-Batterien).
Weitere Einzelheiten zu den unterstützten Meldungen (DGNs) sowohl für RV-C out als auch für RV-C finden Sie in den folgenden Abschnitten.
Um RV-C zu aktivieren, wählen Sie das RV-C-Profil für einen der VE.Can-Anschlüsse im Menü Einstellungen → Konnektivität aus.
Eine detaillierte Spezifikation des Protokolls und der Nachrichtendefinition ist öffentlich zugänglich unter https://www.rv-c.com.
22.1.2. RV-C out
Generisch
Die RV-C-Hauptschnittstelle von GX und alle virtuellen Geräte melden die minimal erforderlichen DGNs:
DGN | DGN# | Beschreibung |
|---|---|---|
Product_ID | 0xFEEB | Hersteller, Produktname, Seriennummer |
SOFTWARE_ID | 0xFEDA | Software-Version |
DM_RV | 0x1FECA | Fehlerdiagnose |
DM01* | 0x0FECA | Fehlerdiagnose |
* Zusätzlich zur DGN DM_RV 0x1FECA ist auch die J1939 DGN DM01 0x0FECA für alle RV-C out Geräte angekündigt, um ältere RV-C-Wächter zu unterstützen, die die DM_RV DGN nicht unterstützen.
Hauptschnittstelle
Die GX-Hauptschnittstelle identifiziert sich als „Control Panel“ (DSA=68) auf RV-C und ist für die Abfrage und Verarbeitung von Daten von allen RV-C-Knoten zuständig.
Nachrichten zur Gleichstromquelle
Alle mit Gleichstrom verbundenen Geräte sind in der Lage, DC_SOURCE_STATUS_1 zu melden. Dazu gehören die Dienste für Wechselrichter/Ladegeräte, Wechselrichter, Ladegeräte, Batterien und Solarladegeräte. VE.Bus Wechselrichter/Ladegerät und Batterie/BMS melden Gleichstrom und Spannung, alle anderen Geräte nur die Spannung.
Gemäß der RV-C-Spezifikation darf nur ein Knoten Nachrichten zur Gleichstromquelle von derselben Instanz senden. Jeder Gerätetyp hat seine eigene Priorität, mit der bestimmt wird, welcher Knoten die Nachrichten zur Gleichstromquelle senden muss. Betrachten Sie das folgende System:
Wechselrichter/Ladegerät (Gleichstromquelle Instanz 1, Prio 100)
Solarladegerät (Gleichstromquelle Instanz 1, Prio 90)
Wechselstromladegerät mit 3 Ausgängen (Gleichstromquelle Instanz 1, 2 & 3, Prio 80)
Batteriemonitor (Gleichstromquelle Instanz 1, Prio 119)
In diesem Fall sendet der Batteriemonitor Daten zur Gleichstromquelle mit der Instanz 1, da diese die höchste Priorität hat. Zusätzlich sendet das Wechselstromladegerät die Daten zur Gleichstromquelle mit Instanz 2 und 3 (Ausgang 2 und 3), da es keine anderen Geräte mit diesen Instanzen gibt. Weitere Informationen über Nachrichten zur Gleichstromquelle finden Sie im Handbuch zur RV-C-Spezifikation. Kapitel 6.5.1 erklärt den Prioritätsmechanismus.
VE.Bus-Wechselrichter/Ladegerät
Geräte
Nur VE.Bus MultiPlus/Quattro. Phoenix Wechselrichter VE.Bus wird ebenfalls von diesem Dienst exportiert, jedoch mit der Anzahl der Wechselstromeingänge auf 0 gesetzt. Der DSA ist auf 66 (Wechselrichter Nr. 1) eingestellt.
Instanzen
Funktion | Standardinstanz | Konfigurierbarer Bereich |
|---|---|---|
Wechselrichter | 1 | 1..13 |
Charger | 1 | 1..13 |
Leitung Nr. 1 (L1) | 0 | 0..1 |
Leitung Nr. 2 (L2) | 1 | 0..1 |
Gleichstromquelle | 1 | 1..250 |
Status
DGN | DGN# | Wert |
|---|---|---|
INVERTER_AC_STATUS_1 | 0x1FFD7 | L1 AC-Ausgangsspannung, Strom, Frequenz L2 AC-Ausgangsspannung, Strom, Frequenz L2-Daten werden nicht gesendet, wenn sie nicht konfiguriert sind |
INVERTER_AC_STATUS_3 | 0x1FFD5 | Leistung L1 AC-Ausgang Leistung L2 AC-Ausgang L2-Daten werden nicht gesendet, wenn sie nicht konfiguriert sind |
INVERTER_STATUS | 0x1FFD4 | Wechselrichterstatus |
CHARGER_AC_STATUS_1 | 0x1FFCA | L1 AC-Eingangsspannung, Strom, Frequenz L2 AC-Eingangsspannung, Strom, Frequenz L2-Daten werden nicht gesendet, wenn sie nicht konfiguriert sind |
CHARGER_AC_STATUS_2 | 0x1FFC9 | Eingangsstrombegrenzung |
CHARGER_AC_STATUS_3C | 0x1FFC8 | Leistung L1 AC-Eingang Leistung L2 AC-Eingang L2-Daten werden nicht gesendet, wenn sie nicht konfiguriert sind Die Leistung ist immer positiv, auch im Falle der Einspeisung |
CHARGER_STATUS | 0x1FFC7 | Zustand des Ladegeräts |
CHARGER_STATUS_2 | 0x1FEA3 | DC-Spannung /-strom Die Priorität des Ladegeräts richtet sich nach der Priorität der Gleichstromquelle |
CHARGER_CONFIGURATION_STATUS | 0x1FFC6 | Maximaler Ladestrom |
CHARGER_CONFIGURATION_STATUS_2 | 0x1FF96 | Eingangsstrombegrenzung, Maximaler Ladestrom (%) |
DC_SOURCE_STATUS_1 | 0x1FFFD | DC-Spannung /-strom Feste Priorität von 100 (Wechselrichter/Ladegerät) |
DC_SOURCE_STATUS_2 | 0x1FFFC | Batterietemperatur Feste Priorität von 100 (Wechselrichter/Ladegerät) |
Befehle
DGN | DGN# | Wert |
|---|---|---|
INVERTER_COMMAND 1) | 0x1FFD3 | Wechselrichter aktivieren/deaktivieren |
CHARGER_COMMAND 1) | 0x1FFC5 | Ladegerät aktivieren/deaktivieren |
CHARGER_CONFIGURATION_COMMAND | 0x1FFC4 | Maximaler Ladestrom Hinweis: Dies ist eine dynamische Einstellung und wird nach einem Neustart des Wechselrichters/Ladegeräts auf den Wert zurückgesetzt, mit dem das Gerät konfiguriert wurde. |
CHARGER_CONFIGURATION_COMMAND_2 | 0x1FF95 | Eingangsstrombegrenzung des Ladegeräts |
1) Vom RV-C aus können Sie das Ladegerät und den Wechselrichter separat steuern. Diese beiden Ein-/Ausschaltwerte werden dann zu einem einzigen Schalterwert kombiniert (wie auf der Seite VE.Bus in der GX-Benutzeroberfläche zu sehen, siehe oberstes Element im Screenshot unten). Wenn der Wechselrichter/Ladegerät eingeschaltet ist, führt das Ausschalten des Ladegeräts dazu, dass nur der Wechselrichter funktioniert. Wenn Sie den Wechselrichter ausschalten, wird nur das Ladegerät eingeschaltet (wenn Landstrom angeschlossen ist).
Victron definiert die folgenden Optionen zur Steuerung eines kombinierten Wechselrichters/Ladegeräts:
Status | Anmerkungen |
|---|---|
Aus | Wechselrichter und Ladegerät sind beide ausgeschaltet |
Nur Wechselrichter | Nur der Wechselrichter ist eingeschaltet |
Nur Ladegerät | Nur das Ladegerät ist eingeschaltet |
Ein | Sowohl der Wechselrichter als auch das Ladegerät sind eingeschaltet |
Mit dieser Option wird das Schaltermenü angezeigt:

Wechselrichter
Geräte
Wechselrichter VE.Direct und Wechselrichter RS. Der DSA ist auf 66 (Wechselrichter Nr. 1) eingestellt.
Instanzen
Funktion | Standardinstanz | Konfigurierbarer Bereich |
|---|---|---|
Wechselrichter | 2 | 1..13 |
Leitung (L1) | 0 | 0..1 |
Gleichstromquelle | 1 | 1..250 |
Status
DGN | DGN# | Wert |
|---|---|---|
INVERTER_AC_STATUS_1 | 0x1FFD7 | L1 AC-Ausgangsspannung, Strom, Frequenz |
INVERTER_AC_STATUS_3 | 0x1FFD5 | L1-Wechselstromausgangsleistung |
INVERTER_STATUS | 0x1FFD4 | Wechselrichterstatus |
DC_SOURCE_STATUS_1 | 0x1FFFD | DC voltage (DC-Stromspannung) Feste Priorität von 60 (Wechselrichter) |
Befehle
DGN | DGN# | Wert |
|---|---|---|
INVERTER_COMMAND | 0x1FFD3 | Wechselrichter aktivieren / deaktivieren / Last erkennen |
Wechselstromladegerät
Geräte
Skylla-I, Skylla-IP44/IP65, Smart IP43 Ladegerät. Der DSA ist auf 74 eingestellt (Konverter Nr. 1).
Instanzen
Funktion | Standardinstanz | Konfigurierbarer Bereich |
|---|---|---|
Charger | 2 | 1..13 |
Leitung (L1) | 0 | 0..1 |
Gleichstromquelle Nr. 1 | 1 | 1..250 |
Gleichstromquelle Nr. 2 | 2 | 1..250 |
Gleichstromquelle Nr. 3 | 3 | 1..250 |
Status
DGN | DGN# | Wert |
|---|---|---|
CHARGER_AC_STATUS_1 | 0x1FFCA | AC-Strom |
CHARGER_AC_STATUS_2 | 0x1FFC9 | Eingangsstrombegrenzung |
CHARGER_STATUS | 0x1FFC7 | Zustand des Ladegeräts |
CHARGER_STATUS_2 | 0x1FEA3 | Gleichstromquelle 1: Spannung, Stromausgang 1 Gleichstromquelle 2: Spannung, Stromausgang 2 Gleichstromquelle 3: Spannung, Stromausgang 3 Instanzen 2, 3 werden nicht gesendet, wenn nicht vorhanden Die Priorität des Ladegeräts richtet sich nach der Priorität der Gleichstromquelle |
CHARGER_CONFIGURATION_STATUS_2 | 0x1FF96 | Eingangsstrombegrenzung |
DC_SOURCE_STATUS_1 | 0x1FFFD | Gleichstromquelle 1: Spannung Gleichstromquelle 2: Spannung Gleichstromquelle 3: Spannung Instanzen 2, 3 werden nicht gesendet, wenn nicht vorhanden. Feste Priorität von 80 (Ladegerät) |
Befehle
DGN | DGN# | Wert |
|---|---|---|
CHARGER_COMMAND | 0x1FFC5 | Ladegerät aktivieren/deaktivieren |
CHARGER_CONFIGURATION_COMMAND_2 | 0x1FF95 | Eingangsstrombegrenzung |
Solar-Ladegerät
Geräte
BlueSolar, SmartSolar, MPPT RS. Der DSA ist auf 141 (Solarladeregler) eingestellt.
Instanzen
Funktion | Standardinstanz | Konfigurierbarer Bereich |
|---|---|---|
Charger | 1 | 1..250 |
Gleichstromquelle | 1 | 1..250 |
Status
DGN | DGN# | Wert |
|---|---|---|
SOLAR_CONTROLLER_STATUS | 0x1FEB3 | Betriebszustand |
SOLAR_CONTROLLER_STATUS_5 | 0x1FE82 | Gesamter Ertrag |
SOLAR_CONTROLLER_BATTERY_STATUS | 0x1FE80 | Batteriespannung /-strom |
SOLAR_CONTROLLER_ARRAY_STATUS | 0x1FDFF | PV-Spannung /-strom |
DC_SOURCE_STATUS_1 | 0x1FFFD | DC voltage (DC-Stromspannung) Feste Priorität von 90 (Ladegerät + 10) |
Batterie/BMS
Geräte
BMV, SmartShunt, Lynx Shunt, Lynx Ion, Lynx Smart BMS, BMS-Can Batterien. Der DSA ist auf 69 (Ladezustand der Batterie - Monitor) eingestellt.
Instanzen
Funktion | Standardinstanz | Konfigurierbarer Bereich |
|---|---|---|
Netz | 1 | 0..120 |
Anlasser | 2 | 0..120 |
Status
DGN | DGN# | Wert |
|---|---|---|
DC_SOURCE_STATUS_1 | 0x1FFFD | Spannung, Strom Starterinstanz wird nicht gesendet, wenn keine Starterbatterie vorhanden ist |
DC_SOURCE_STATUS_2 | 0x1FFFC | Temperatur, soc, Restzeit |
DC_SOURCE_STATUS_4 | 0x1FEC9 | Gewünschte maximale Spannung, Strom, Ladezustand Nur für Lynx Smart BMS (NG) gesendet |
DC_SOURCE_STATUS_6 | 0x1FEC7 | HV-Grenzwert/Trennstatus, LV-Grenzwert/Trennstatus Nur für Lynx Smart BMS (NG) gesendet und ohne Einhaltung der 2-Sekunden-Vorwarnung im Falle einer BMS-Trennung |
DC_SOURCE_STATUS_11 | 0x1FEA5 | Entlade-/Aufladezustand ein/aus, Kapazität, Leistung Nur für Lynx Smart BMS (NG) gesendet und ohne Einhaltung der 2-Sekunden-Vorwarnung im Falle einer BMS-Trennung |
DC_SOURCE_LOAD_CONTROL | 0x1FDA8 | Gewünschter Ladezustand, minimale Spannung, maximaler Strom Nur für Lynx Smart BMS (NG) gesendet |
Tanks
Geräte
Integrierte Tanks, GX-Tank, N2K-Tanks. Der DSA ist für LPG-Tanks auf 73 (LPG) und für alle anderen Tanktypen auf 72 (Wasser/Abfalltanksystem) eingestellt.
Instanzen
Funktion | Standardinstanz | Konfigurierbarer Bereich |
|---|---|---|
Tank | 0 | 0..15 |
Status
DGN | DGN# | Wert |
|---|---|---|
TANK_STATUS | 0x1FFB7 | Flüssigkeitstyp, relativer Füllstand, absoluter Füllstand, Tankgröße Auflösung auf 100 festgelegt |
Befehle:
DGN | DGN# | Wert |
|---|---|---|
TANK CALIBRATION COMMAND | 0x1FFB6 | Tankgröße |
RV-C unterstützt nur 4 Tankarten (0...3), während Victron bis zu 11 Tankarten unterstützt. Die Tabelle mit den zusätzlichen Tankarten ist Victron-spezifisch und ist mit den von uns verwendeten Tankarten kompatibel.
Unterstützte Tankarten:
Venus / NMEA 2000 | RV-C | |
|---|---|---|
Flüssigkeitstyp | Flüssigkeitscode | Typ |
Kraftstoff | 0 | 4 (herstellerdefiniert) |
Süßwasser | 1 | 0 |
Abwasser (Grauwasser) | 2 | 2 |
Lebendfischbehälter | 3 | 5 (herstellerdefiniert) |
Öl | 4 | 6 (herstellerdefiniert) |
Schwarzwasser | 5 | 1 |
Benzin | 6 | 7 (herstellerdefiniert) |
Diesel | 7 | 8 (herstellerdefiniert) |
LPG | 8 | 3 |
LNG | 9 | 9 (herstellerdefiniert) |
Hydrauliköl | 10 | 10 (herstellerdefiniert) |
Brauchwasser | 11 | 11 (herstellerdefiniert) |
Bitte beachten Sie, dass herstellerdefiniert bedeutet, dass diese Flüssigkeitstypen nicht in RV-C definiert sind, sondern nur für Victron RV-C Geräte verwendet werden.
Lichtmaschine
Geräte
Orion XS und kompatible Lichtmaschinenregler von Drittanbietern, wie beispielsweise Wakespeed WS500. Der DSA ist auf 76 eingestellt (Laderegler).
Instanzen
Funktion | Standardinstanz | Konfigurierbarer Bereich |
|---|---|---|
Charger | 3 | 1..13 |
Gleichstromquelle | 1 | 1..250 |
Status
DGN | DGN# | Wert |
|---|---|---|
CHARGER_STATUS | 0x1FFC7 | Ladezustand, Zielspannung (falls verfügbar), Zielstrom (falls verfügbar), Prozentsatz (falls verfügbar) |
CHARGER_STATUS_2 | 0x1FEA3 | Spannung, Strom Die Priorität des Ladegeräts richtet sich nach der Priorität der Gleichstromquelle |
CHARGER_CONFIGURATION_STATUS | 0x1FFC6 | Batteriesensor, maximaler Ladestrom |
DC_SOURCE_STATUS_1 | 0x1FFFD | Gleichstromspannung Feste Priorität von 70 |
Befehle
DGN | DGN# | Wert |
|---|---|---|
CHARGER_COMMAND | 0x1FFC5 | Ladegerät aktivieren/deaktivieren |
Automatischer Start/Stopp des Generators
Geräte
Es sind bis zu zwei Instanzen für den automatischen Start/Stopp des GX-Generators zu erwarten, jede mit eigenem SA. Einer für die vom GX-Relais gesteuerte Instanz und einer für ein angeschlossenes Aggregat, z. B. ein Hatz. Der DSA ist auf 65 eingestellt (Regler für Generatorstart).
Instanzen
N. z.
Status
DGN | DGN# | Wert |
|---|---|---|
AGS_DEMAND_CONFIGURATION_STATUS | 0x1FED5 | Auf OEM-Schalter deaktivieren |
Befehle
DGN | DGN# | Wert |
|---|---|---|
AGS_DEMAND_CONFIGURATION_COMMAND | 0x1FED4 | Auf OEM-Schalter deaktivieren |
GENERATOR_DEMAND_CONFIGURATION_COMMAND | 0x1FEE6 | Auf OEM-Schalter deaktivieren |
Da diesen Befehls-DGNs die Instanziierung fehlt, sind alle Instanzen für den automatischen Start/Stopp des GX-Generators betroffen.
22.1.3. DGN 60928 Eindeutige Identifikationsnummerb]n
Die eindeutige Identifikationsnummer wird in der internen CAN-Bus-Gerätedatenbank des GX-Geräts verwendet, um Geräte bei der Adressbestimmung zu vergleichen.
Um Störungen auf dem CAN-Bus zu vermeiden, müssen Sie das zweite GX-Gerät auf den eindeutigen Identitätsbereich von 1000 bis 1499 einstellen. Dies kann erreicht werden, indem der eindeutige Identitätsselektierer auf 2 (2 * 500) gesetzt wird. Dies funktioniert genauso wie bei VE.Can, siehe Abschnitt PGN 60928 NAME Eindeutige Identitätsnummern.
Das GX-Gerät weist jedem virtuellen Gerät eine individuelle, eindeutige Identifikationsnummer zu. Ändern Sie diese nur, wenn Sie mehrere GX-Geräte in einem RV-C-Netzwerk verwenden. |  |
22.1.4. RV-C in
Tanks
Geprüft mit Garnet SeeLeveL II 709 und Tanks aus der RV-C out-Funktion eines anderen GX-Geräts.
Batterien
Lithionics und BattleBorn sind die einzigen unterstützten RV-C-Batterien (einschließlich DVCC-Unterstützung).
Lichtmaschinen
Seit Version 3.xx wird Wakespeed WS500(-PRO), ARCO Zeus und Revatek Altion und Altion MAX unterstützt. Für die Integration mit dem Lynx Smart BMS (NG) über RV-C ist es zwingend erforderlich, den Kontakt Laden zulassen des BMS fest mit dem Lichtmaschinenregler zu verdrahten.
22.1.5. Geräteklassen
Dieser Abschnitt gibt einen grundlegenden Überblick darüber, wie die einzelnen Geräteklassen an der RV-C-Spezifikation teilnehmen. In jedem Fall wird die „Level 1”-Integration weitgehend unterstützt (Basisbetrieb), wobei von Fall zu Fall Erweiterungen vorgenommen werden.
Unabhängige AC-Ladegeräte
Die AC-basierte Ladegeräteklasse teilt ihren Betriebs- und Konfigurationsstatus mit Hilfe der CHARGER_xx-Gruppe von RV-C-Nachrichten mit. Die Benutzersteuerung muss das Ein- und Ausschalten über das RV-C-Protokoll sowie die Einstellung der Grenzwerte für die Landstromversorgung (AC) umfassen.
Unabhängige AC-Wechselrichter
Diese Klasse von AC-Wechselrichtern meldet ihren Betriebszustand über die Gruppe INVERTER_xx der RV-C-Mitteilungen. Der eingehende Befehl ist auf ein/aus (aktivieren/deaktivieren) über RV-C beschränkt.
AC-Ladegerät / -Wechselrichter
Kombinierter Wechselrichter/Ladegerät - zeigt sowohl CHARGER_xx als auch INVERTER_xx Meldungen an.
Solarregler
Die Solarladegeräte melden ihren Betriebsstatus in Echtzeit.
Ladezustandsmesser
Ladezustandsmesser können dazu verwendet werden, den aktuellen Batteriestatus über RV-C zu melden: Spannung, Strom, Temperatur, Ladezustand, usw. RV-C verlangt, dass immer nur EIN Gerät für eine bestimmte Batterie antwortet. Wenn also ein geeignetes BMS installiert ist, wird dieses die Datenquelle sein.
BMS (unterstützt von Victron oder Victron-Drittanbietern)
In vielen Fällen wird/werden die Batterie(n) im System direkt an ein Victron Cerbo GX oder Cerbo-S GX angeschlossen sein, entweder über Victron-Geräte oder über unterstützte kompatible BMS von Drittanbietern. Solche Batterien sollten in der RV-C-Umgebung über die DC_SOURCE_STATUSxx-Nachrichten dargestellt werden.
Tankfüllstandsmesser
Tankzähler werden in RV-C-Nachrichten übersetzt, wobei die bestehenden Tank-IDs/VRM-Instanznummern weitergeführt werden.
22.1.6. Instanzübersetzung
RV-C nutzt Instanzen auf verschiedene Arten:
Gleichstromquelleninstanz
AC-Leitung
Geräteinstanz (kontextabhängig)
Jede Verwendung der Instanz hat eine bestimmte Bedeutung, und ein bestimmtes Gerät kann zeitweise eine oder mehrere dieser Instanzen verwenden.
Gleichstromquelleninstanz
In RV-C ist eine Gleichstromquelle etwas, das Energie erzeugen und (optional) speichern kann. In der Regel eine Batterie, es kann aber auch eine Brennstoffzelle oder die Ausgangsseite eines Gleichstromschützes/Trennschalters sein.
Eine Gleichstromquelle kann als ein Batteriesystem und der dazugehörige physikalische Bus betrachtet werden, z. B. die Hausbatterie, die Gleichstromsammelschiene und die Gleichstromverkabelung. Gleichstromquelleninstanzen werden verwendet, um nachfolgende Geräte (z. B. ein Ladegerät oder einen Wechselrichter) mit dem „Gleichstrombus” zu verknüpfen, an den sie angeschlossen sind.
Auf diese Weise ist es möglich, die Verbindung aller Geräte mit ihrem DC-Bus über den Wert ihrer Gleichstromquelleninstanz darzustellen (Starterbatterie und ihre Lichtmaschine, Hausbatterie und ihre Ladegeräte usw.).
Beachten Sie, dass in einigen Fällen (z. B. bei einem DC-DC-Wandler oder einem Schütz) ein Gerät mit zwei verschiedenen Gleichstromquelleninstanzen verbunden sein kann. So würde z. B. ein DC-DC-Wandler mit den beiden „Batterien” assoziiert, an die er angeschlossen ist, während ein Schütz mit der Batterie assoziiert werden könnte, an die es angeschlossen ist, wobei eine separate Gleichstromquelleninstanz dann der nachfolgende DC-Bus auf der Lastseite des Schützes darstellt.
Obwohl Victron in der Lage ist, mehr als eine Batterie (eine Haus- und eine Starterbatterie) zu unterstützen, liegt der Schwerpunkt auf einer Batterie. Das dbus-rvc-Modul stellt dem RV-C die „primäre” Batterie als „Gleichstromquelleninstanz = 1” (Hausbatterie) Information zur Verfügung.
Falls vorhanden, werden zusätzliche Victron-Messgeräte mit Gleichstromquelleninstanzen von 2 dargestellt. Als Beispiel sei die optionale Spannungsmessung der Starterbatterie an SmartShunts genannt.
Wechselstromleitung
Die Wechselstromleitung ist viel einfacher, da RV-C von einem begrenzten Wechselstromsystem ausgeht, das üblicherweise als Leitung 1 oder Leitung 2 definiert ist. Victron unterstützt dreiphasige Systeme, was in der RV-C-Spezifikation nicht enthalten ist. Alle Installationen mit 3-Phasen-Systemen werden vom dbus-RVC-Modul nicht unterstützt und AC-bezogene RV-C-Meldungen werden entsprechend unterdrückt.
Geräteinstanz
Die Geräteinstanz ist eine Möglichkeit, verschiedene physische Geräte desselben Typs voneinander zu trennen. Beispiel: Wenn eine Anlage zwei Wechselstrom-Ladegeräte enthält, die an dieselbe Batterie angeschlossen sind, würde so jedem eine eigene Geräteinstanz zugewiesen, während beide dieselbe Gleichstromquelleninstanz nutzen würden Jedes Ladegerät wäre auch mit einer Wechselstromleitung verbunden, die zwar dieselbe sein kann, aber nicht sein muss. Auf diese Weise wird das AC-Ladegerät vollständig durch seine AC- und DC-Verkabelung beschrieben, während es durch seine Geräteinstanz eindeutig identifiziert werden kann.
Geräteinstanzen sind innerhalb einer bestimmten Klasse von Geräten relevant. Ein Wechselstrom-Ladegerät kann die Geräteinstanzen 1 und 2 definieren, die nicht mit den Geräteinstanzen 1 und 2 eines Gleichstrom-Motorsteuergeräts verbunden sind.
Anmerkung
Mit Ausnahme der Tanküberwachung sind die Geräteinstanzen für jede spezifische Geräteklasse fest als 1 programmiert.
22.1.7. RV-C Fehler- und Störungsbeseitigung
RV-C-Fehlermeldungen:
Fehlerzustände werden über die DGNs DM_RV (0x1FECA) und J1939 DM01 (0x1FECA) gemeldet.
In Version 1 werden die Bits für den Betriebsstatus, das gelbe und das rote Leuchtfeld unterstützt, da sie in DSA gespeichert sind.
SPN wird unter normalen Bedingungen auf 0xFFFFFF gesetzt und immer dann auf 0x0, wenn eine Warnung oder ein Fehlerzustand in unterstützten Victron-Geräten vorliegt.
FMI wird stets auf 0x1F (Failure mode not available) gesetzt.
Diese einfache Zuordnung ermöglicht die Anzeige eines Alarm- oder Fehlerzustands in einem bestimmten Victron-Gerät auf externen Benutzerdisplays, so dass der Benutzer die Victron-Diagnosehilfen für zusätzliche Erkenntnisse nutzen kann.
22.1.8. RV-C-Gerätepriorität
Ein entscheidendes Konzept beim RV-C ist die Anwendung von Geräteprioritäten.
Die Priorität eines bestimmten Geräts wirkt sich darauf aus, ob es DGNs senden darf (z. B. sollte ein BMS mit einer höheren Priorität Details zum Batteriestatus senden, während ein MPPT-Regler mit einer niedrigeren Priorität zurückstehen sollte).
Die Gerätepriorität wird manchmal auch verwendet, um bestimmte Knoten anderen vorzuziehen, so kann es z. B. wünschenswert sein, Landstrom statt Wechselstrom zu verwenden.
Bei der Implementierung von dbus-rvc werden die folgenden Prioritäten in den übertragenen Nachrichten fest einprogrammiert:
DC_SOURCE_STATUS_xx-Meldungen: Priorität = 120 (SoC/BMS)
SOLAR_xx-Meldungen: Priorität des Ladegeräts = 110
CHARGER_xx-Meldungen (Wechselrichter/Ladegeräte): Priorität des Ladegeräts = 100
CHARGER_xx-Meldungen (AC-Ladegeräte): Priorität des Ladegeräts = 80
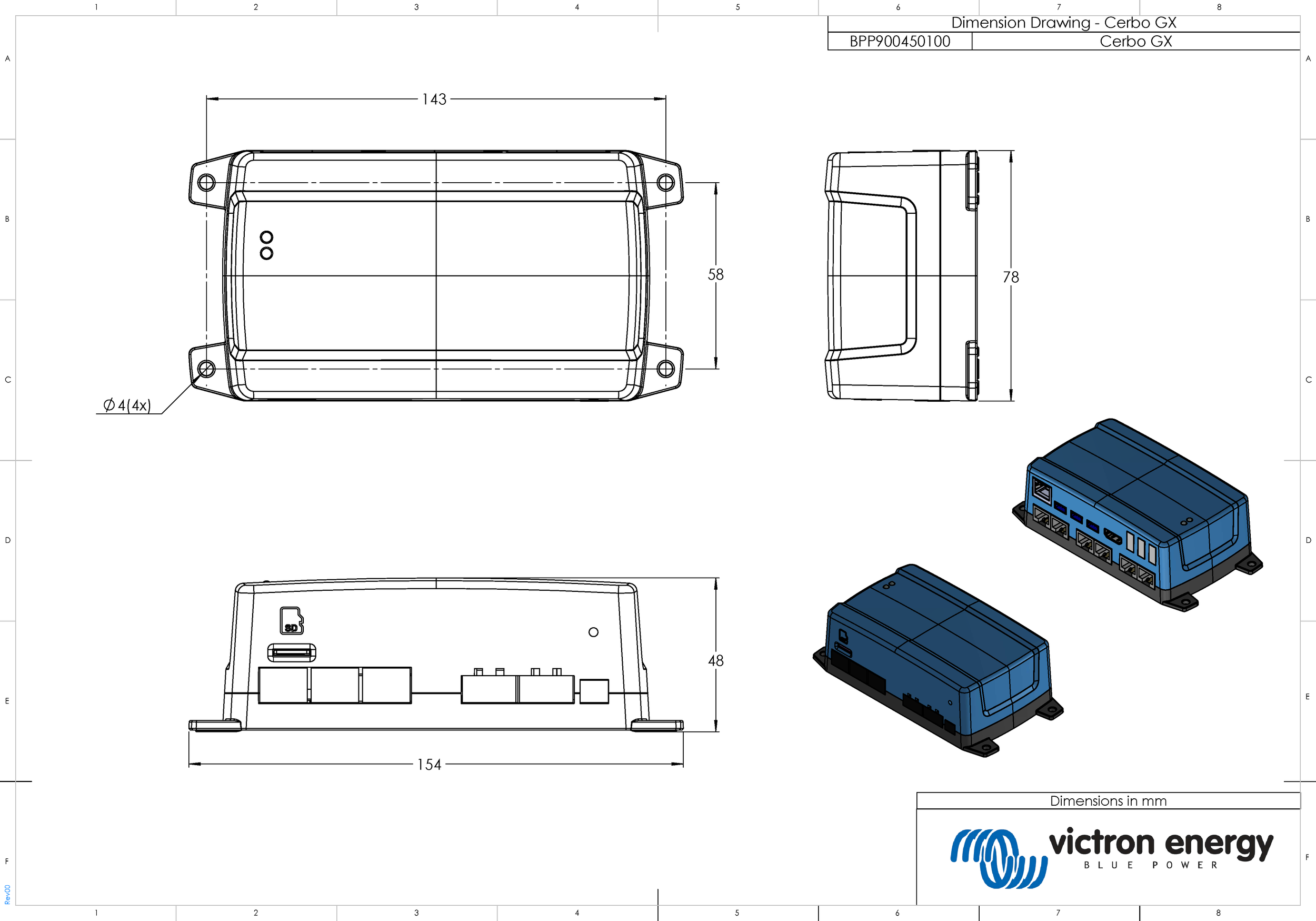
22.2. Cerbo GX Maße
22.3. Modbus-Halteregister für den ComAp InteliLite 4-Regler
In der folgenden Tabelle ist die erforderliche ComAp-Modbus-Konfiguration aufgeführt. Zusätzlich zu den aufgeführten Halteregistern wird Spule 4700 zum Starten und Stoppen des Aggregats verwendet.
Register | Kom. Obj. | Name | DIM | Typ | Dez | Gruppe |
|---|---|---|---|---|---|---|
01004 | 10123 | U/min | U/min | int16 | 0 | Motor |
01006 | 9152 | T-Kühlmittel | °C | int16 | 0 | Regler E/A |
01008 | 9151 | P-Öl | bar | int16 | 1 | Regler E/A |
01013 - 01014 | 8206 | Betriebsstunden | h | int32 | 1 | Statistiken |
01020 | 8202 | Last P | kW | int16 | 0 | Last |
01021 | 8524 | Last P L1 | kW | int16 | 0 | Last |
01022 | 8525 | Last P L2 | kW | int16 | 0 | Last |
01023 | 8526 | Last P L3 | kW | int16 | 0 | Last |
01036 | 8210 | Generatorfrequenz | Hz | uint16 | 1 | Generator |
01037 | 8192 | Generatorspannung L1-N | V | uint16 | 0 | Generator |
01038 | 8193 | Generatorspannung L2-N | V | uint16 | 0 | Generator |
01039 | 8194 | Generatorspannung L3-N | V | uint16 | 0 | Generator |
01043 | 8198 | Laststrom L1 | A | uint16 | 0 | Last |
01044 | 8199 | Laststrom L2 | A | uint16 | 0 | Last |
01045 | 8200 | Laststrom L3 | A | uint16 | 0 | Last |
01053 | 8213 | Batterie-Volt | V | int16 | 1 | Regler E/A |
01055 | 9153 | Kraftstoffstand | % | int16 | 0 | Regler E/A |
01263 - 01264 | 8205 | Aggregat kWh | kWh | int32 | 0 | Statistiken |
01298 | 9244 | Motorzustand | String-Liste | Info | ||
01301 | 12944 | Anschlusstyp | String-Liste | Info | ||
01307 - 01322 | 24501 | ID-String | Langer String | Info | ||
01323 - 01330 | 24339 | FW-Version | Kurzer String | Info | ||
01382 | 9887 | Reglermodus | String-Liste | Info | ||
03000 - 03007 | 8637 | Aggregatname | Kurzer String | Grundeinstellungen / Name | ||
22.4. Modbus-Halteregister für unterstützte DSE-Aggregateregler
In der folgenden Tabelle sind die Modbus-Halteregister aufgeführt, die das GX-Gerät ausliest. Beachten Sie, dass diese Modbus-Tabelle die DSE-Registerliste wiedergibt, nicht die des GX-Geräts. Diese Definitionen folgen dem Deep Sea Electronics GenComm Standard (Version 2.236 MF). Die Modbus-Registerliste zum Auslesen dieser Daten aus dem GX-Gerät finden Sie im Abschnitt Downloads auf der Victron-Website.
Die in der Spalte Anmerkungen als erforderlich gekennzeichneten Register sind entscheidend für die Identifizierung der DSE-Aggregatregler im GX-Gerät und für den ordnungsgemäßen Betrieb des Victron-Ökosystems mit dem Generator. Nehmen Sie keine Änderungen vor. Alle anderen Register sind optional.
Hinweis: Seite und Registerversatz sind Begriffe aus dem DSE GenComm Standard.
Register | Seite | Versatz | Name | Einheiten | Anmerkungen |
|---|---|---|---|---|---|
768 | 3 | 0 | Herstellercode | Erforderlich für die Identifizierung von DSE-Reglern | |
769 | 3 | 1 | Modellnummer | ||
770 | 3 | 2 | Seriennummer | ||
772 | 3 | 4 | Steuerungsmodus | ||
1024 | 4 | 0 | Öldruck | kPa | |
1025 | 4 | 1 | Kühlmitteltemperatur | °C | |
1026 | 4 | 2 | Öltemperatur | °C | |
1027 | 4 | 3 | Kraftstoffstand | % | |
1029 | 4 | 5 | Batteriespannung des Motors | V | |
1030 | 4 | 6 | Motordrehzahl | U/min | Erforderlich für den ordnungsgemäßen Betrieb des Victron-Ökosystems |
1031 | 4 | 7 | Generatorfrequenz | Hz | |
1032 | 4 | 8 | Generatorspannung L1-N | V | |
1034 | 4 | 10 | Generatorspannung L2-N | V | |
1036 | 4 | 12 | Generatorspannung L3-N | V | |
1044 | 4 | 20 | Generatorstrom L1 | A | |
1046 | 4 | 22 | Generatorstrom L2 | A | |
1048 | 4 | 24 | Generatorstrom L3 | A | |
1052 | 4 | 28 | Generator-Watt L1 | W | |
1054 | 4 | 30 | Generator-Watt L2 | W | |
1056 | 4 | 32 | Generator-Watt L3 | W | |
1536 | 6 | 0 | Gesamt-Watt des Generators | W | |
1558 | 6 | 22 | % der maximalen Leistung des Generators | % | |
1798 | 7 | 6 | Motorlaufzeit | Sekunden | |
1800 | 7 | 8 | Generator pos. kW Stunden | kWh | |
1808 | 7 | 16 | Anzahl der Starts | ||
Von 2048 | 8 | Alarmbedingungen | |||
4096 bis 4103 | 16 | Steuerregister | |||
Von 39424 | 154 | Alarmbedingungen |