 Add this page to your book
Add this page to your book  Remove this page from your book
Remove this page from your book  Manage book (
Manage book ( Help
Help This is an old revision of the document!
Table of Contents
Color Control GX manual
The Color Control GX (CCGX) sits at the heart of your energy installation. All the other system-components - such as inverter/chargers, solar chargers, and batteries - are connected to it. The CCGX ensures that they all work in harmony.
Monitoring can be done either with the CCGX in front of you - or from anywhere in the world using an internet connection and the VRM Website
The CCGX also provides Remote firmware updates and even allows the settings to be Changed Remotely.
The Color Control GX is part of the GX product family. GX products are Victron's state-of-the-art monitoring solution that run our Venus OS operating system.
All the information in this manual refers to the latest software. Your device will update itself to the latest version automatically. Check our blog posts to see that your device has the latest firmware:https://www.victronenergy.com/blog/category/firmware-software/
1. Installation
1.1 Overview of connections

1.2 Snap-on ferrite beads for class B EMI compliance
In order to reduce Electromagnetic emissions in compliance with class B EMI you should place the provided snap-on ferrite beads around every connection cable as close as possible to the Color Control.
HQ1700 and later
For serial numbers HQ1700 and later, mount a single snap-on ferrite bead (supplied with the unit) around the power leads like this:

HQ1654 and earlier
For serial numbers HQ1654 and earlier, mount the snap-on ferrite beads as below:

1.3 Power
Power the device using the Power in V+ connector. It accepts 8 to 70 V DC. The device will not power itself from any of the network connections. The supplied DC power cable includes an inline 3.15 A slow blow fuse.
Powering in systems with VE.Bus BMS
When the CCGX is used in an installation with a VE.Bus BMS, connect the Power in V+ on the CCGX to the terminal labelled 'Load disconnect' on the VE.Bus BMS. Connect both negative leads to the negative stub of a common Battery.
A Cautionary word about Powering from the AC-out terminal of a VE.Bus Inverter, Multi or Quattro:
If you power the CCGX from an AC adaptor connected to the AC-out port of any VE.Bus product (Inverter, Multi or Quattro), then a deadlock will occur after the VE.Bus products are powered-down for any reason (after any operational fault or during a black start). The VE.Bus devices will not boot-up until the CCGX has power …but the CCGX will not boot-up until it has power. This deadlock can be rectified by briefly unplugging the CCGX VE.Bus cable at which point you will observe the VE.Bus products will immediately begin to boot-up.
Or a modification can be done to the RJ45 cabling. See FAQ Q21 for more information about this.
Isolation
Because the CCGX is connected to many different products, please ensure that proper care is taken with isolation to prevent ground loops. In 99% of installations this will not be a problem.
- The VE.Bus ports are isolated
- The VE.Direct ports are isolated
- The VE.Can ports are isolated
- The USB ports are not isolated. Connecting a Wi-Fi Dongle or GPS Dongle will not create a problem as it is not connected to another power supply. Even though there will be ground loop when you mount a separately-powered USB hub, during extensive testing we have not found that it caused any issues.
- The Ethernet port is isolated, except for the shield: use unshielded UTP cables for the Ethernet network
Extending USB ports by use of a self-powered USB hub
Although the number of USB ports can be extended by using a hub, there is a limit to the amount of power that the onboard USB port can provide. When extending the number of USB ports, we recommend you always use powered USB hubs. And to minimize the chance of issues, be sure to use good-quality USB hubs. As Victron also offers a VE.Direct to USB adapter, you can use this arrangement to increase the number of VE.Direct devices you can connect to your system, please see this document for the limit of how many devices can be attached to various different GX devices.
1.4 Connecting Victron products
1.4.1 Multis/Quattros/Inverters (VE.Bus products)
In order to keep this document short we are going to refer to all Multis, Quattros and Inverters as VE.Bus products.
The earliest version of the VE.Bus devices which can be connected to the CCGX is 19xx111 or 20xx111, which were released in 2007. VE.Bus firmware 26xxxxx and 27xxxxx are also supported …but 18xxxxx is not.
Note that it is not possible to use the Remote On/Off (header on the VE.Bus control PCB) in combination with a CCGX. There should be wire between the left and middle terminal, as it is when shipped from the factory. In case a wired switch that disables the system is required, use the Safety Switch Assistant.
Single VE.Bus products
To connect a single VE.Bus product, connect it to one of the VE.Bus sockets on the back of the CCGX. Both sockets are identical, use either one. Use a standard RJ45 UTP cable, see our pricelist.
Parallel, split- and three-phase VE.Bus systems
To connect multiple VE.Bus products, configured as a parallel, split-phase or three phase VE.Bus system, connect either the first or the last VE.Bus product in the chain to either one of the VE.Bus sockets on the back of the CCGX. Use a standard RJ45 UTP cable, see our pricelist.
Systems consisting of five or more VE.Bus products, connected to a CCGX with serial number HQ1628 or earlier require the 'CCGX dongle for large VE.Bus systems (Product Number: BPP900300100).
VE.Bus systems with Lithium batteries and a VE.Bus BMS
- Connect the CCGX to the socket labelled ‘MultiPlus/Quattro’, or to one of the Multis/Quattros in the system. Do not connect it to the Remote panel socket on the VE.Bus BMS.
- Note that it will not be possible to control the On/Off/Charger Only switch. This option is automatically disabled in the CCGX menu when a VE.Bus BMS is used. The only way to control a Multi or Quattro when used with a VE.Bus BMS is to add a Digital Multi Control to the system. Setting the input current limit is possible in systems with a VE.Bus BMS.
- Combining MultiPlus/Quattro with a VE.Bus BMS and a Digital Multi Control is possible. Simply connect the Digital Multi Control to the RJ-45 socket on the VE.Bus BMS labelled Remote panel.
- To allow auto-power-down in the CCGX in case of a low battery, make sure the CCGX is powered via the VE.Bus BMS: connect Power in V+ on the CCGX to Load disconnect on the VE.Bus BMS. And connect both negative leads to the negative stub of a common Battery.
Combining the CCGX with a Digital Multi Control
It is possible to connect both a CCGX and a Digital Multi control to a VE.Bus system. The ability to switch the product On, Off or set it to Charger Only via the CCGX will be disabled. The same applies to the input current limit: when there is a Digital Multi Control in the system, the input current limit which is set at that control panel will be the master-setting, and changing it on the CCGX will not be possible.
Connecting multiple VE.Bus systems to a single CCGX
Only one VE.Bus system can be connected to the VE.Bus ports on the back of the CCGX. The professional way to to monitor more systems is to add a second CCGX.
If you do require to connect more than one system to the same CCGX, use an MK3-USB. Functionality will be limited:
- Only the system connected to the built-in VE.Bus ports is used to generate the data on the Overview pages.
- All connected systems will be visible on the Device-list
- All connected systems will be taken into account for Energy consumption and distribution calculations (kWh graphs on VRM)
- Only the system connected to the built-in VE.Bus ports is used for the Generator start/stop logic
- The CCGX will not send proper data to VRM any more. The Venus GX does send information of both systems to VRM: its therefor better to use a Venus GX for systems like this.
- In case of an ESS system, only the system connected to the built-in VE.Bus ports is used in the ESS mechanisms. The other one is displayed in the device list only.
Alternatively the VE.Bus to VE.Can interface (ASS030520105) can be used. Add one for each additional system. Note that we advise against it; this interface is a deprecated product. Make sure that the VE.Can network is terminated and powered. For powering the VE.Can network, see Q17 in our data communication whitepaper.
1.4.2 Battery Monitor BMV-700 series; and MPPTs with a VE.Direct port
Either one or two compatible products can be connected directly on the back of the CCGX using a standard VE.Direct cable. There are two types of VE.Direct cable available:
- Straight VE.Direct cables, ASS030530xxx
- VE.Direct cables with an angled connector on one end. These are designed to minimize the required depth behind a panel, ASS030531xxx
VE.Direct cables have a maximum length of 10 metres. It is not possible to extend them. If longer lengths are required, use the VE.Direct to VE.Can interface. Note that this only works for BMV700 and BMV702. Not for the BMV712, MPPT solar chargers and Inverters with a VE.Direct port. See next paragraph for more information on that VE.Can interface.
Connecting more than two devices to your CCGX using VE.Direct
First of all, note that the maximum of VE.Direct devices that can be connected is 5 for the CCGX. How they are connected, so direct, via USB or via CAN, does not change the maximum. See here for the Venus GX, Octo GX, and other limits.
- Option 1: Use the VE.Direct to USB interface. The CCGX has two USB ports. Use a USB-hub when more than two USB ports are required.
- Option 2: The BMV700 and BMV702 can also be connected using the VE.Direct to VE.Can interface. Note that the BMV712, MPPTs and VEDirect Inverters cannot be connected using this canbus interface as it does not translate the data into canbus messages. When using the VE.Direct to VE.Can interface, make sure that the VE.Can network is terminated, and also powered. For powering the VE.Can network, see Q17 in our data communication whitepaper.
Notes about older VE.Direct MPPTs
- The MPPTs need to run firmware version v1.09 or later. See the Victron Professional website https://professional.victronenergy.com/ to obtain files and for update instructions.
- An MPPT 70/15 needs to be from year/week 1308 or later. Earlier 70/15s are not compatible with the CCGX, and unfortunately upgrading the MPPT firmware will not help. To find the year/week number of your model, look for the serial number which is printed on a label on its back. For example number HQ1309DER4F means 2013, week 09.
1.4.3 Skylla-i, Lynx Shunt VE.Can, Lynx Ion + Shunt and MPPTs with a VE.Can port
To connect a product with a VE.Can port, use a standard RJ45 UTP cable. (Available with straight and elbow connectors)
Don't forget to terminate the VE.Can network at both ends using a VE.Can terminator. A bag with two terminators is supplied with each VE.Can product. They are also available separately.
Other notes:
- In order to work with the CCGX an MPPT 150/70 needs run firmware v2.00 or newer.
- You can combine a Skylla-i control panel with a CCGX.
- You can combine a Ion Control panel with a CCGX.
- The Skylla-i, Lynx Shunt VE.Can, Lynx Ion + Shunt and the MPPTs with a VE.Can port all power the VE.Can network …so it won't be necessary to power the VE.Can network separately in these circumstances. All the protocol converters - for example the VE.Bus to VE.Can interface; and the BMV to VE.Can interface, do not power the VE.Can network.
1.4.4 BMV-600 series
Connect the BMV-600 using the VE.Direct to BMV-60xS cable supplied. (ASS0305322xx)
1.4.5 DC Link box
Connect the DC Link box, using the RJ-12 cable supplied. Then connect the BMV-700 to the CCGX - see 1.2.2 above for instructions.
1.4.6 VE.Can Resistive Tank Sender Adapter
See its page and manual on our website for details about the Adapter.
To connect a product with a VE.Can port, use a standard RJ45 UTP cable.
Don't forget to terminate the VE.Can network on both ends using a VE.Can terminator. A bag with two terminators is supplied with each VE.Can product. They are also available separately (ASS030700000). (Available with straight or elbow connectors.)
Make sure that the canbus is powered, see the Power chapter in the Tank Sender Adapter manual for details.
1.4.7 NMEA Tank senders from other manufacturers
A tank sender must meet the following requirements to be visible on the CCGX:
- Transmit the NMEA2000 Fluid Level PGN, 127505
- The NMEA2000 device class needs to be 'General', 80
- The NMEA2000 function needs to be 'Transducer', 190
Since v2.17 the following functions are accepted as well:
- The NMEA2000 device class 'General', 80 and function 'Sensor', 170
- The NMEA2000 device class 'Sensors', 75 and function 'Fluid Level', 150
A single function reporting multiple Fluid Levels is currently not supported.
For some tank senders it is also possible to configure the capacity and the fluid type from the CCGX - for example the Maretron TLA100. This facility may be available with other senders made by other manufacturers - it's well-worth trying.
To connect an NMEA2000 network to the VE.Can port on the CCGX, use a VE.Can to NMEA2000 cable.
Alternatively, instead of a VE.Can to NMEA200, you can use a 3802 cable from Oceanic Systems: https://osukl.com/ve-can-adaptor/. The difference is that it lends itself well to connecting a single NMEA-2000 device into a VE.Can network. It's also able to power a lower voltage NMEA-2000 network directly from a 48V Victron system.
1.5 Connecting a PV Inverter
Measuring the output of a PV Inverter will provide the user with an overview of both actual power balance and the energy distribution. Note that these measurements are only used to display information. They are not needed, nor used, by the installation for its performance.
Besides monitoring, the GX device can also curtail some types and brands of PV Inverters, ie. reduce their output power. This is used, and required, for the ESS Zero feed-in feature.
Direct connections
| Type | Zero feed-in | Details |
|---|---|---|
| Fronius | Yes | LAN Connection, see GX - Fronius manual |
| SMA | No | LAN Connection, see GX - SMA manual |
| SolarEdge | No | LAN Connection, see GX - SolarEdge manual |
| ABB | Yes | LAN Connection, see GX - ABB manual |
Using a meter
For PV Inverters that cannot be interfaced digitally, a meter can be used:
| Type | Zero feed-in | Details |
|---|---|---|
| AC Current Sensor | No | Connected to inverter/charger analog input. Lowest cost - least accurate. AC Current Sensor Manual |
| Energy Meter | No | wired to the CCGX, or connected wirelessly using our Zigbee to USB/RS485 interfaces. See the energy-meters |
| Wireless AC sensors | No | See the Wireless AC Sensor manual - Discontinued |
1.6 Internet connectivity
Connect the CCGX to the internet to get all the advantages of the VRM Portal. The CCGX sends data from all connected products to the VRM portal - from where you can monitor energy usage, view the current status of connected products, configure email alarms and download data in CSV and Excel formats.
To monitor this data from your smartphone or tablet download the iOS or Android VRM App.
In addition to remote monitoring, an active internet connection allows the CCGX to regularly check for a new firmware versions - which will be automatically downloaded and installed.
There are several ways to connect a CCGX to the internet:
- Run a network cable between a router and the CCGX Ethernet LAN port
- Connect to a router wirelessly using a USB Wi-Fi dongle plugged into the CCGX
- Via the mobile (cellular) network, using a 3G or 4G router
- USB Tethering on a mobile phone
This video explains how to connect LAN, WiFi and a GX GSM:
The chapters below describe the options in detail.
1.6.1 Ethernet LAN port
When you connect an ethernet cable between a router and CCGX, the Settings>Ethernet page of your CCGX will confirm connection.
1.6.2 Wi-Fi USB dongle
Using a Wi-Fi dongle it is possible to connect to WEP, WPA and WPA2 secured networks. There are four supported USB Wi-Fi dongles. Two of them are also available from stock at Victron Energy:
- Partno. BPP900100200 - CCGX WiFi module simple (Nano USB), small, low cost.
- Partno. BPP900200300 - Asus USB-N14, slightly higher cost and also better reception than the Nano USB. Supported since software version 2.23.
WiFi modules that are no longer available, but still supported, are:
- Partno. BPP900200100 - Startech USB300WN2X2D
- Partno. BPP900100100 - Zyxel NWD2105
- Partno. BPP900200200 - Gembird WNP-UA-002, slightly higher cost and also better reception.
Although other Wi-Fi dongles may work, they have not been tested and we do not offer support for other dongles.
The Wi-Fi menu shows the available networks. When a network is selected, it is possible to fill in the password (if the password is not already known) to connect to the network. Setting up via WPS (Wi-Fi Protected Setup) is not supported.
When the CCGX finds multiple Wi-Fi networks of which the password is known, the strongest network is selected automatically. When the signal of the connected network becomes too weak, it will automatically switch to a stronger network - if it knows the password of that network.
1.6.3 Mobile (cellular) network using a 3G or 4G router
To connect the CCGX to a mobile (cellular) network, such as a 3G or 4G network, use a cellular router. Connect the CCGX to that router with either a LAN cable or the router's Wi-Fi network.
Make sure you use a router that is designed for unattended setups. Do not use low cost consumer-grade routers intended for business or leisure travel. A more expensive professional router will quickly pay for itself, and you won't have wasted journeys simply to perform a re-set. Examples of such professional routers are the H685 4G LTE from Proroute, as well as the Industrial 4G router range from Pepwave.
More information in this blogpost.
Note that the CCGX does not support USB 3G/4G dongles.
1.6.4 USB tethering using a mobile phone
This is a useful facility when it works - but don't rely on it because it has not proved very dependable. Consult the internet for instructions about tethering for your phone and its particular operating system. We have heard of it working on:
- Samsung Galaxy S4
…but not on:
- iPhone 5s with iOS 8.1.1
1.6.5 IP Configuration
Almost no installations will need the IP address configuration to be inserted manually as most systems support automatic IP configuration (DHCP) - and that is also the CCGX default setting. If you do need to configure the address manually, select the following template:
Complete details of IP requirements, as well as used port numbers will be found in the VRM FAQ - ports and connections used by the CCGX.
1.6.6 Connecting both Ethernet and Wi-Fi (failover)
It is possible to connect the CCGX to both Ethernet and Wi-Fi. In this case, the CCGX will try to determine which interface provides an active internet connection and then use that interface. When both have an active internet connection, the Ethernet connection is used. The CCGX will automatically check again for active internet connections when something changes on the interfaces.
1.6.7 Minimize internet traffic
In situations where internet traffic is expensive, for example a satellite uplink or with roaming GSM/cellular charges, you may want to minimize the internet traffic. The steps to take are:
- Disable auto-update
- Do not enable remote support
- Reduce the Logging interval to a very low frequency. Note that state changes (charging → inverting, or bulk→float) and also alarms will cause extra messages to be sent
To find out how much data allowance you need to buy the best way is to let the system run for a couple of days and monitor the internet RX and TX counters in your 3G or 4G router. Or even better, some mobile companies will report the data used via a website.
The amount of data used is also very dependent on the system:
- More products connected to the CCGX will generate more data.
- A state change (from inverter to charger for example) will trigger a data transmission, so a system with very frequent state changes will also tend to generate more data. This is especially true in certain Hub-1 and Hub-2 systems.
Note that CCGX versions prior to v1.18 will check for software updates daily even when auto-update is switched off. This was changed in v1.18. Disabling auto-update also disables the check - saving a lot of data.
We recommend setting-up your data plan in such a way as to avoid costly 'excess' charges. Make sure you put a cap on your data usage; or use a pre-paid plan.
One customer - burdened with global costs of between twenty cents and several euros per mb of data - invented a clever solution: Using a VPN he modified the IP to route ALL traffic to and from the CCGX via his VPN. Using a firewall at the VPN server allows him to control traffic according to time, connection type, place and destinations. Although this is beyond the scope of this manual it works, and - with the help of a Linux and networking expert - it can work for you.
1.6.8 More information about setting up an internet connection and VRM
1.7 Connecting a USB GPS
Use a GPS to track remote vehicles or boats and, optionally, get an alarm when they leave a designated area (geofencing). It is also possible to download a gps-tracks.kml file which can be opened with Navlink and Google Earth for example.
Victron does not sell USB-GPS, but the CCGX will support third-party GPS modules which use the NMEA0183 command-set - almost all do. It can communicate at both 4800 and 38400 baud rates. Plug the unit into either of the two USB sockets …connection may take a few minutes, but the CCGX will automatically recognize the GPS. The unit's location will automatically be sent to the VRM online portal and its position shown on the map.
The CCGX has been tested for compatibility with:
- Globalsat BU353-W SiRF STAR III 4800 baud
- Globalsat ND100 SiRF STAR III 38400 baud
- Globalsat BU353S4 SiRF STAR IV 4800 baud
- Globalsat MR350 + BR305US SiRF STAR III 4800 baud
1.8 Connecting a Fischer Panda Generator
1.9 Connecting NMEA-2000 tank senders
A thrid party NMEA2000 tank sender must meet the following requirements to be visible on the GX Device:
- Transmit the NMEA2000 Fluid Level PGN, 127505
- The NMEA2000 device class needs to either General (80) in combination with function code Transducer (190), or Sensor (170). Or, the NMEA2000 device class needs to be Sensors (75), in combination with function Fluid Level (150).
A single function reporting multiple Fluid Levels is currently not supported.
For some tank senders it is also possible to configure the capacity and the fluid type on the GX Device - for example the Maretron TLA100. This facility may be available with other senders made by other manufacturers - it's well-worth trying.
To connect an NMEA2000 network to the VE.Can port on the CCGX, use a VE.Can to NMEA2000 cable.
Alternatively, instead of a VE.Can to NMEA200, you can use a 3802 cable from Oceanic Systems: https://osukl.com/ve-can-adaptor/. The difference is that it lends itself well to connecting a single NMEA-2000 device into a VE.Can network. It's also able to power a lower voltage NMEA-2000 network directly from a 48V Victron system.
Tested NMEA2000 tank senders:
- Maretron TLA100
- Navico Fluid Level Sensor Fuel-0 PK, partno. 000-11518-001. Note that this sender requires a 12V powered NMEA2000 network; it breaks when connected to a 24V-powered NMEA2000 network. And note that you need a Navico display to configure the Capacity, Fluid type, and other parameters of the sensor.
Most likely others work as well. If you know of one working well, please edit this page -or- get in touch with us on Community -> Modifications.
1.10 Connecting IMT Solar Irradiance, Temperature and Wind Speed Sensors
1.10.1 Compatibility
Ingenieurbüro Mencke & Tegtmeyer GmbH (IMT) offer a range of digital silicon irradiance sensor models within the Si-RS485 series that are all compatible with a Victron GX device.
The optional/additional external module temperature, ambient temperature and wind speed sensors are also supported.
Optional/additional external sensors are either connected to the solar irradiance sensor with pre-installed plugs or pre-wired to the solar irradiance sensor (external module and ambient temperature only). When external sensors are connected via an appropriate solar irradiance sensor, all measurement data is transmitted to the Victron GX device with the single interface cable.
Each model solar irradiance sensor within Si-RS485 series has a different capability with regards to external sensors (or comes with an external sensor pre-wired), so carefully consider any future desires/requirements before initial purchase.
It is also possible to connect an independent IMT Tm-RS485-MB module temperature sensor (visible as ‘cell temperature’) or IMT Ta-ext-RS485-MB ambient temperature sensor (visible as ‘external temperature’) directly to the Victron GX device, without a solar irradiance sensor or in addition to one.
1.10.2 Operation
The IMT Si-RS485 series solar irradiance sensors operate using RS485 electrical interface and Modbus RTU communication protocol.
The required interface software is pre-installed within the Venus OS, however the Victron GX device must be running recent firmware - FW v2.40 is the minimum requirement.
Physical connection to the Vicron GX device is via USB port and requires a Victron RS485 to USB interface cable.
A suitable external DC power source (12 to 28 VDC) is also required - the sensor is NOT powered via USB.
1.10.3 Wiring Connections
The schematic in the installation guide below depicts the wiring configuration in a typical installation.
The table below describes the colour and function of each wire in the installation.
| IMT Si-RS485 Series Irradiance Sensor | Victron RS485 to USB Interface | Description |
|---|---|---|
| Brown | Orange | RS485 Data + |
| Orange | Yellow | RS485 Data - |
| Red | - | Power Pos - 12 to 28 VDC |
| Black | - | Power Neg/Gnd - 0 VDC |
| Black Thick | - | Cable Shield - PE |
| - | Red | Power Pos - 5 VDC (not used) |
| - | Black | Power Neg/Gnd - 0 VDC (not used) |
| - | Brown | Terminator 1 - 120R (not used) |
| - | Green | Terminator 2 - 120R (not used) |
1.10.4 Installation Notes
1- The maximum DC power supply voltage permitted for the IMT Si-RS485 series solar irradiance sensor range is 28.0 VDC - accordingly for 24 V and 48 V battery banks/systems an appropriate Victron DC-DC converter (24/12, 24/24, 48/12 or 48/24) or AC-DC adaptor must be utilised in the installation.
For 12 V battery banks/systems the IMT Si-RS485 series solar irradiance sensor range may be powered directly from the battery bank and will continue to operate down to minimum voltage of 10.5 V (as measured at the sensor, account for voltage drop in the cable).
2- For detailed wiring/installation notes and specifications refer to the IMT Si-RS485 series solar irradiance sensor 'Quick Reference Guide' and Victron RS485 to USB interface cable ‘Datasheet’.
To ensure signal integrity and robust operation, particularly ensure that;
- Extension cabling complies with the minimum cross-sectional area specifications in the related table - dependent on DC supply voltage and cable length
- Extension cabling has appropriate shielding and twisted pair cores
- The original cable attached to the Victron RS485 to USB interface is reduced to a maximum length of 20cm in installations where the total cable length is over 10m or there are installation/site specific interference issues – in this case appropriate/high quality cabling should be used for the entire cable length, rather than only for the extension length
- Cabling is installed separated/away from the main DC or AC power cabling
- All wiring is properly terminated (including unused wires) and properly isolated from weather/water ingress
- The sensor housing is not opened or tampered with during installation - as sealing integrity will be compromised (and warranty void)
3- The IMT Si-RS485TC series solar irradiance sensor includes internal Galvanic Isolation (up to 1000V) between power supply and RS485 Modbus circuits, accordingly the non-isolated Victron RS485 to USB interface is suitable for most installations.
However, if an isolated RS485 to USB interface is preferred the only compatible device is Hjelmslund Electronics USB485-STIXL (any others type will not be recognised by the GX device).
1.10.5 Multiple Sensors
It is possible to connect multiple IMT Si-RS485 series solar irradiance sensors to a common Victron GX device, however a dedicated Victron RS485 to USB interface is required for each individual unit.
Multiple units cannot be combined on a single interface (as this is not supported by the related Venus OS software).
1.10.6 Configuration
There is normally no need for any special/additional configuration – the default ‘as shipped’ configuration is compatible for communication with a Victron GX device.
However, in cases where the IMT Si-RS485 series solar irradiance sensor has been previously used in another system and/or the settings changed for any reason, it is necessary to restore the default configuration before further use.
To revise the configuration, download the IMT 'Si-MODBUS-Configuration software tool'. Follow the instructions in the IMT ‘Si Modbus Configurator Documentation’. and check/update the following settings:
- MODBUS Address: 1
- Baud Rate: 9600
- Data Format: 8N1 (10 Bit)
For further support related to configuration of the IMT Si-RS485 Series irradiance sensors please contact IMT Solar directly.
1.10.7 User Interface - GX Device
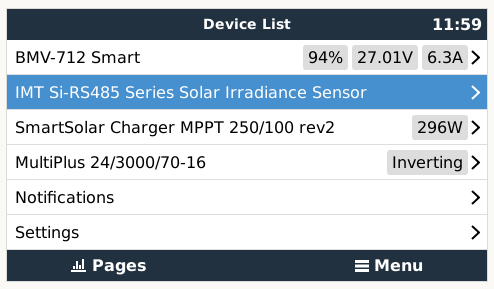
Upon connection to the Victron GX device and power up the IMT Si-RS485 Series irradiance sensor will be automatically detected within a few minutes and appear in the 'Device List' menu.
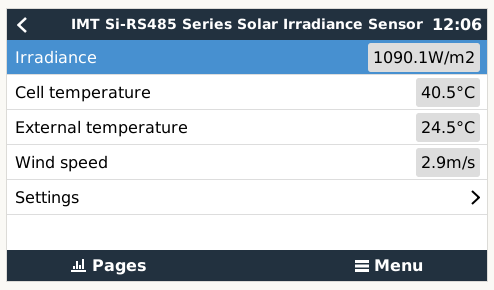
Within the ‘IMT Si-RS485 Series Solar Irradiance Sensor’ menu all available parameters will be automatically displayed (dependent on the sensors connected) and update in real time.
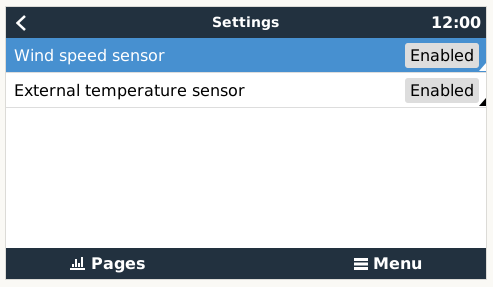
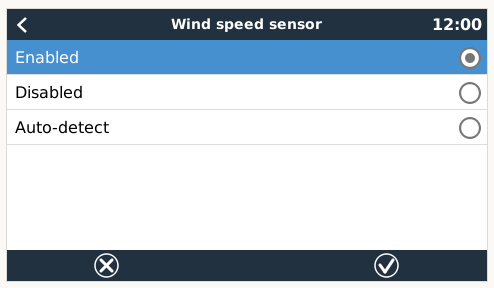
Within the ‘Settings’ sub-menu it is possible to manually enable and disable any optional/additional external sensors that are connected to the IMT Si-RS485 Series irradiance sensor.
1.10.8 Data Visualisation - VRM
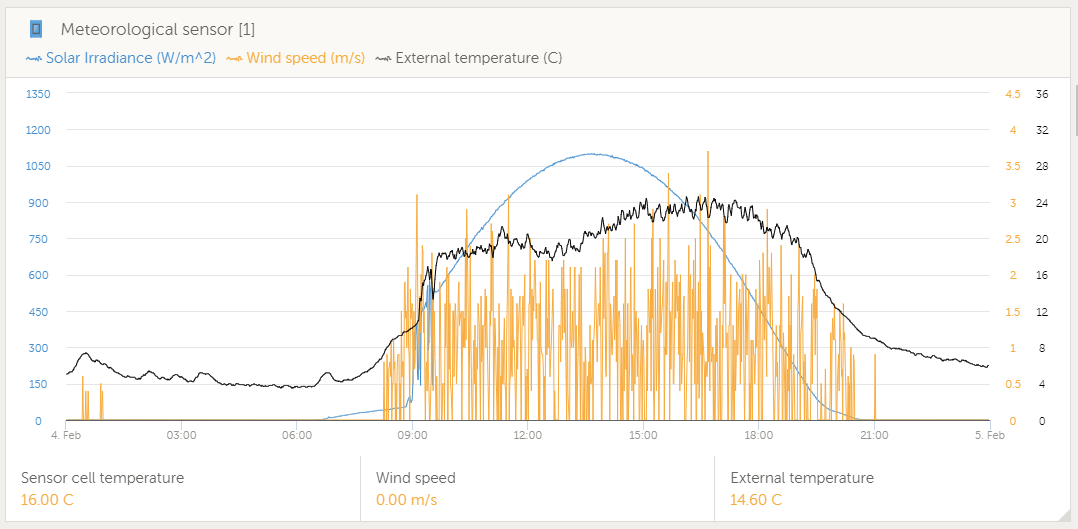
To review logged historical data on the VRM portal, expand the ‘Meteorological Sensor’ widget list and select the ‘Meteorological Sensor’ widget.
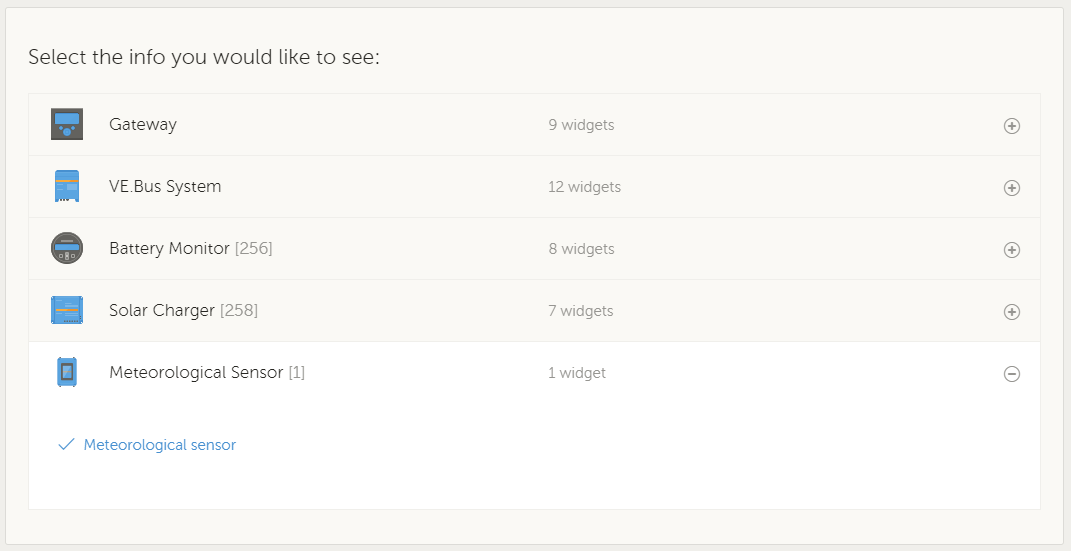
Data from all available sensor types will be automatically displayed in the graph. Individual sensors/parameters can also be disabled/enabled by clicking on the sensor name/legend.
2 Configuration
2.1 Configurable parameters
After completing the installation and setting up the internet connection (if required), go through the menu from top to bottom to configure the CCGX:
| Item | Default | Description |
|---|---|---|
| General | ||
| Remote support | Off | Enable this to allow Victron engineers to access your system in case there is a problem. |
| Access level | User and installer | Set this to 'User' to prevent accidental and unwanted changes to the configuration. |
| Audible alarm | On | When there is an alarm on the CCGX or a connected product, the CCGX will beep - unless this setting is set to 'Off'. |
| Demo mode | Off | Turn 'On' to demonstrate product and installation features to a client or at an exhibition. This simulation mode will allow better understanding without (yet) changing any settings. |
| Firmware | ||
| Online updates: Auto update | Check and update | We recommend the factory default. A reason to disable it would be to eliminate the risk of a firmware update causing problems. |
| Online updates: Update to | Latest release | Use the default setting unless you want to participate in test versions. End-user systems should certainly be set to 'Latest release'. |
| Offline updates | Use this menu to install a new version from a microSD card or USB stick. Insert the card or stick that holds the new firmware .swu file. | |
| Stored backup firmware | With this feature you can go back to the previously installed firmware version. | |
| Date & time | ||
| Date/Time local | Automatic from internet | When connected to the internet, time will be automatically synchronised regardless of this setting. Toggle the setting Manually input the time where no internet connection is present. |
| Change time zone | Select the correct time zone. | |
| Remote console | ||
| Disable password check | Password authentication not required for remote console access. | |
| Enable password check | Choose password to allow remote console access. | |
| Enable on VRM | No | Enabling on VRM will allow connection to the CCGX from anywhere via the VRM portal. Trouble shooting Remote Console on VRM |
| Enable on LAN | No | Enabling will allow direct connection to the CCGX by typing its IP address or Venus.local into a web browser, or in VictronConnect when connected to the same network. Only Enable this function on trusted networks. Disable password check, or set password first |
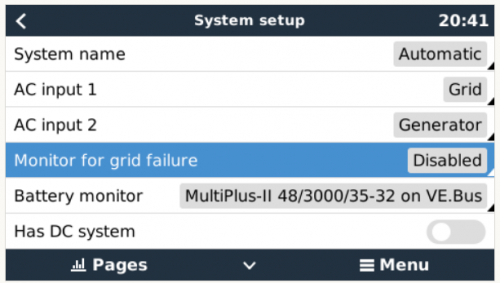
| System setup | ||
| AC input 1 | Generator | Select Generator or Grid. (We will shortly be adding the setting 'Shore power' instead of grid.) |
| AC input 2 | Grid | Same choices as above. |
| Battery monitor | Automatic | Select the SOC source. This function is useful where there is more than one BMV. More details. |
| Synchronize VE.Bus SOC with battery | Continuously copies the SOC from the battery monitor to the VE.Bus system. This feature is automatically enabled when the active SOC source is not a VE.Bus device, and there is no Hub-2 Assistant configured. The purpose of this is to be able to use the BMV SOC to trigger some Multi or Quattro features - such as Genset start/stop. Multis and Quattro's don't use the SOC for any other purpose. More information | |
| Use solar charger current to improve VE.Bus SOC | Send the total charge current from all connected Solar chargers to the VE.Bus device to improve its SOC computations. This feature is automatically active when 'Synchronize VE.Bus SOC with battery' is not active. Requires Multi Firmware version >= 402. More information | |
| Solar charger voltage control | Use the 'charge voltage' information provided by the VE.Bus device to control the amount of power fed from solar chargers back to the grid. Active if the ESS or Hub-1 assistant is present. (See also: 'Feed-in excess solar charger power' in the ESS settings.) | |
| Solar charger current control | Limit the charge current of the connected solar chargers if a CAN.bus BMS is present - using the maximum charge current information provided by the BMS. | |
| Has DC system | No | Enable this for boats, vehicles and installations with DC loads and chargers - in addition to Multi and MPPT chargers. This won't be applicable to most off-grid installations; and any discrepancy between the DC current measured by the Multi, and by the BMV, will be attributed to a 'DC system'. This may be power-in from an alternator, or power-out from a pump, for example. A positive value indicates consumption. A negative value indicates charging, for example by an alternator. Note that the value shown will always be an approximation, and is affected by the variation in sample rate between elements of the system. |
| Display & language | ||
| Brightness | Configure the brightness between 0 and 100% | |
| Display off time | Set time-to-off between 10s / 30s - 1m / 10m /30m - or never | |
| Show mobile overview | No | Enable this to show the mobile overview page which is designed for Marine and Remote Vehicle applications. This overview gives direct access to the AC Current limit as well as the On/Off/Charger-only settings and pump control. Also shows up to four tank levels. |
| Language | English | Choose between English, Dutch, Chinese, German, Spanish, French, Italian, Swedish, Turkish and Arabic. |
| VRM online portal | ||
| Log interval | 15 minutes | Set to anything between 1 minute and 1 day. Choose longer times on systems with an unreliable connection. Note that this setting does not affect reporting problems and state changes (bulk → absorption) to the VRM Portal. These events initiate an immediate transmission of all parameters. |
| Rest of parameters | See section 5.3, Datalogging to VRM, for more details | |
| Wireless AC Sensors | ||
| Select the position for each AC sensor (PV Inverter on AC-input 1, 2 or on AC-output). More information about the Wireless AC sensors. | ||
| Energy meters | ||
| Configure the Energy meters, used for one of three things: Measure the output of a PV Inverter Measure and regulate a Hub-4 system Measure and regulate a ESS system Measure the output of an AC Generator. |
||
| ESS | ||
| Configure Energy storage system (ESS) ESS system. | ||
| Hub-4 | ||
| Configure Hub-4 system Hub-4 system. | ||
| Ethernet | ||
| Select the configuration type (DHCP vs. manual configuration) and IP settings. | ||
| Wi-Fi | ||
| Manage wireless networks and IP settings. | ||
| GPS | ||
| Format | Select the format in which to show the Latitude and Longitude. | |
| Speed unit | km/h | Choose between km/h, meters per second, miles per hour, or knots. |
| Generator start/stop | ||
| Configure generator autostart settings and conditions. generator_start_stop | ||
| Tank pump | ||
| Configure automatic starting and stopping of pump based on tank level(sender) information. Pump auto start/stop with Color Control GX | ||
| Relay | ||
| Function | Alarm relay | Select the relay function. Possible functions are 'Alarm relay', 'Generator start/stop', 'Tank pump' and 'None' (disabled). |
| Polarity | Normally open | Select the polarity of the relay on the back of the CCGX. 'Normally open' or 'Normally closed'. (Note that setting it to normally closed increases the CCGX power draw.) |
| Services | ||
| ModbusTCP | Off | This setting enables the ModbusTCP service. More information about ModbusTCP in this document: https://www.victronenergy.com/upload/documents/Whitepaper-Data-communication-with-Victron-Energy-products_EN.pdf |
| VRM two-way communication | No | Enable remote configuration and firmware updates. VE Power Setup manual |
When using a VE.Bus system, it is possible to configure the severity of problems on the VE.Bus system that should cause a notification to show up on the CCGX (and make it beep):
- Disabled: The CCGX will never beep or show a notification
- Alarm only: The CCGX will only beep and a show a notification when the VE.Bus system switched off in an alarm condition.
- Enabled (default): The CCGX will beep and show a notification
When all done, don't forget to change the access level to user when required.
2.2 Battery State of Charge (SOC)
2.2.1 Which device should I use for SOC calculation?
There are three products types that calculate State Of Charge (SOC). The CCGX itself does not calculate SOC, it only retrieves it from the connected devices.
The three products that calculate SOC are:
- Battery Monitors, such as the BMVs, the Lynx Shunt, or the Lynx Ion BMS
- Multi and Quattro inverter/chargers
- Batteries with built-in battery monitor and a (mostly CAN bus) connection to the CCGX.
When to use what?
If you have a battery with build-in battery monitor, such as a BYD or Freedomwon battery; its easy. Use that.
If not, then the options depend on the type of system:
1. If the MultiPlus or Quattro inverter/charger is the only source of charge to the batteries and the only draw then it can function as a basic battery monitor because it counts what went in and counts what comes out. No need for a dedicated battery such as the BMV.
2. If the systems consists of an inverter/charger, MPPTs and a GX device, then there is still no need to add a dedicated battery monitor.
3. For any other system types, such as a boat or vehicle with DC lights and other loads, a dedicated battery monitor will be required.
2.2.2 The different solutions explained in detail
(A) Battery and Multi or Quattro (a typical backup system)
No battery monitor is required: the Multi or Quattro is the only product connected to the battery and has full control over all charge and discharge currents. Therefore it can calculate the correct SOC itself.
Configuration:
- Enable and configure the Battery Monitor in VEConfigure.
- In the CCGX, in Settings → System setup, verify the selected Battery Monitor. It should be set to the Multi or Quattro.
(B) Battery with Multi or Quattro and MPPT Solar Chargers -ALSO- An EasySolar with CCGX built-in
No battery monitor is required, as long as all MPPT Solar Chargers are Victron products and are connected to the CCGX. The CCGX will continuously read the actual charge current from all solar chargers, and send the total to the Multi (or Quattro) which then uses that information in its SOC calculations.
Configuration:
- Enable and configure the Battery Monitor in VEConfigure.
- On the CCGX, in Settings → System setup, verify the selected Battery Monitor. It should be the Multi or Quattro.
- In the same menu, verify that the option 'Use solar charger current to improve VE.Bus SOC' is enabled. Note that this is not a setting - it just an indicator of an automatic process.
Note that this feature requires recent firmware versions in both the Multis or Quattros (402 minimum), and the CCGX (v2.06 minimum).
(C) Batteries with a built-in battery monitor
In cases where the system includes a battery which has a built-in battery monitor and SOC calculation - such as many of the batteries listed here - a dedicated battery monitor is not required.
Configuration:
- Connect the battery communications cable to the CCGX according to the instructions.
- In the CCGX, in Settings → System setup, verify that the selected Battery Monitor is the battery.
Note that the Battery Monitor setting in VEConfigure3 is irrelevant. For systems like this, changing this setting will have no effect on the charge or any other parameters in this type of system.
(D) Other system types
When there are more chargers, or loads, connected to the battery than just the Multi or MPPT Solar Chargers, a dedicated Battery Monitor will be required. Examples are:
- House loads in Marine or Vehicle system.
- PWM Solar Chargers
- AC chargers, such as Skylla-is, Phoenix chargers, non Victron chargers, etc.
- Alternators
- DC-DC chargers
- Wind turbines
- Hydro turbines
In case a battery with built-in monitor is used, such as explained in (C), then that is the dedicated battery Monitor. Refer to section (C).
Otherwise, install a BMV or Lynx Shunt VE.Can.
Configuration:
- Configure the battery monitor as per its documentation.
- In the CCGX, in Settings → System setup, verify the selected Battery Monitor. It should be the BMV or Lynx Shunt Battery Monitor.
- Finished.
Note that the Battery Monitor setting in VEConfigure3 is irrelevant. For systems like this, changing this setting will have no effect on the charge - or any other parameters - in this type of system.
2.2.3 Notes
- Note that this is all about showing an accurate state of charge to the user, rather than being required for an efficient system. The SOC percentage is not used for battery charging. It is, however, required when a generator needs to be started and stopped automatically based on battery SOC.
- For hub-2 installations we recommend you do not add a BMV to the system as it will only confuse the user when there are two SOCs with different readings being displayed.
More information:
- CCGX Manual - configurable parameters. See Battery Monitor selection and Has DC System.
2.2.4 Selecting SOC source
(Settings → System Setup → Battery monitor)
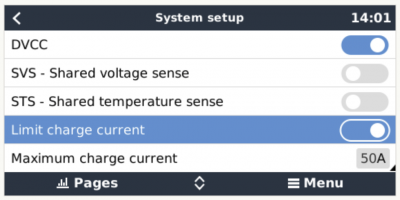
In the image below you can see a range of selectable choices for the SOC values which are shown in the main Overview screen. Choose the source you want to see on the main Overview screen of your CCGX.

In the image above we have chosen the Automatic setting. When automatic is selected the System setup screen will be as shown in the image below.

The 'Automatic' function uses the following logic:
- When available, it will use a dedicated Battery Monitor, such as the BMV or a Lynx Shunt, or a battery with built-in battery monitor.
- When there is more than one of those connected, it will use a random one - although you can select one manually.
- when there is no dedicated Battery Monitor, it will use the VE.Bus SOC.
When should I use the 'No battery monitor' option?:
Use that in systems where:
- there is a Multi or Quattro installed
- no BMV or other battery monitor is installed
- the system has other DC loads, or other chargers, connected to the same battery, which are not connected to the CCGX.
A short explanation: the VE.Bus SOC as determined by the Multi or Quattro will be incorrect in above situation. As it will not take the discharge and charge currents by those other DC Loads, and also unmonitored chargers, into account.
2.2.5 Details on VE.Bus SOC
- While the Inverter/Charger is in bulk, the SOC will not rise above the value as set in VEConfigure3 for the “State of charge when Bulk finished“ parameter on the General tab; default 85%. In a system with Solar chargers, make sure that the Absorption voltage as configured in the MPPT is slightly above the same setting in the inverter/charger. The latter needs to recognize that the battery voltage has reached the absorption level. If it doesn’t, the SOC will be stuck at the earlier mentioned End-of-bulk percentage, default 85%.
2.3 Customize the logo on the Boat & Motorhome page
It is possible to use a custom logo onto the Boat & Motorhome page.
Type the following address into the web browser of a device connected to the same network. Using this address as a template: http://[ip-here]/logo.php (inserting your device’s IP address between the square brackets). The IP address can be found by going to Settings > Ethernet or Wifi. Once the page is loaded, Choose an image file from your device. Re-boot the GX device.
3 VE.Bus Inverter/charger monitoring
3.1 Input current-limiter setting
'Overruled by remote' setting in VEConfigure
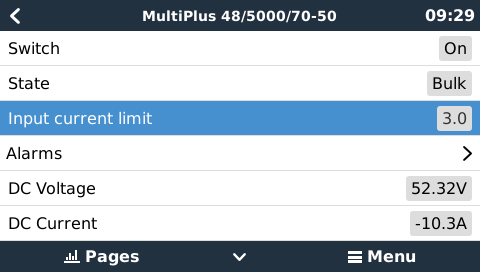
This chapter explains the implications of enabling or disabling user control of the input current-limiter setting, as seen here in the menu:
The limit as set by the user in the CCGX will be applied to all inputs where 'Overruled by remote', configured with VEConfigure, is enabled:
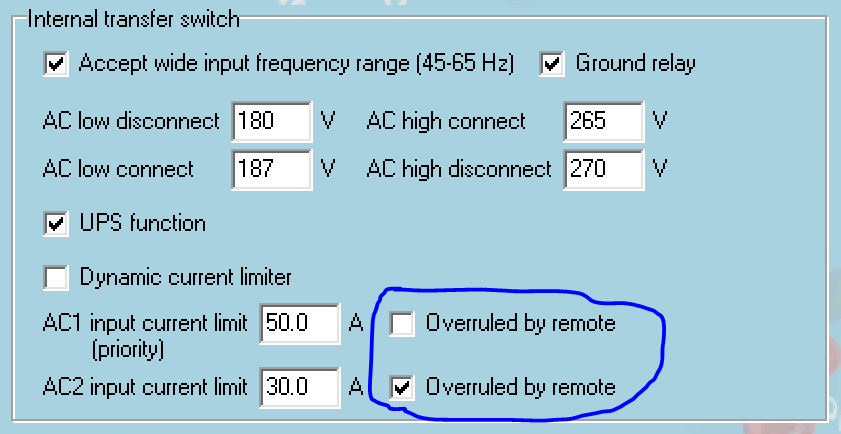
Using the example of a boat with two AC inputs and a Quattro where:
- A Genset capable of delivering 50A is connected to input 1;
- Shore power is connected to input 2. (Available power depends on the rating of the harbour power-supply.)
Configure the system exactly as in above VEConfigure screenshot. Input 1 has priority over input 2, therefore the system will automatically connect to the genset whenever it is running. The fixed input current limit of 50A will be applied. And when the genset is not available, and mains is available on input 2, the Quattro will use the input current limit as configured in the CCGX.
Two more examples: (In both cases if you disable 'Overrule by remote', setting a current limit in the CCGX will have no effect. And if you enable 'Overrule by remote' for both inputs, the current limit set in the CCGX will be applied to both inputs.)
Systems where it is not possible to control the input current limit
It is not possible to control the input current limit in certain installations. In these cases, the CCGX menu will not allow changing the setting:
- Installations with a VE.Bus BMS
- Installations with a Digital Multi Control (or its predecessors)
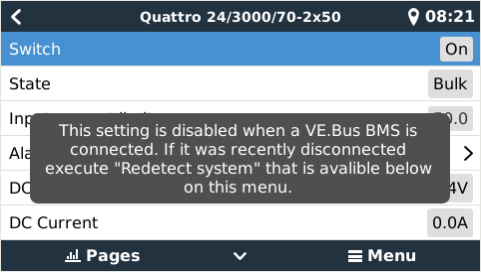
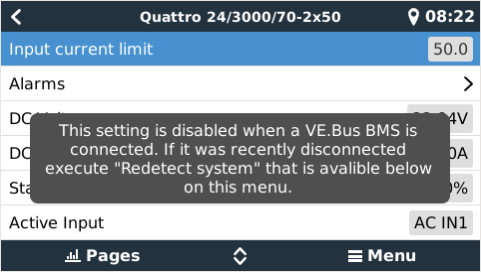
Also the on/off/charger only switch in the CCGX will be disabled in the case.
In installation with a VE.Bus BMS, use the rocker switch instead - or add a Digital Multi Control to the installation.
Minimum input current limit values
When PowerAssist is enabled in VEConfigure, there is a minimum input current limit. The actual limit differs for each model.
After setting the input current to a value below the limit, it will automatically be increased again to the limit.
Note that is still possible to set the input current limit to 0. When set to 0, the system will be in passthrough (charger disabled).
Parallel and three phase systems
The configured AC input current limit is the total limit per phase.
3.2 Phase rotation warning
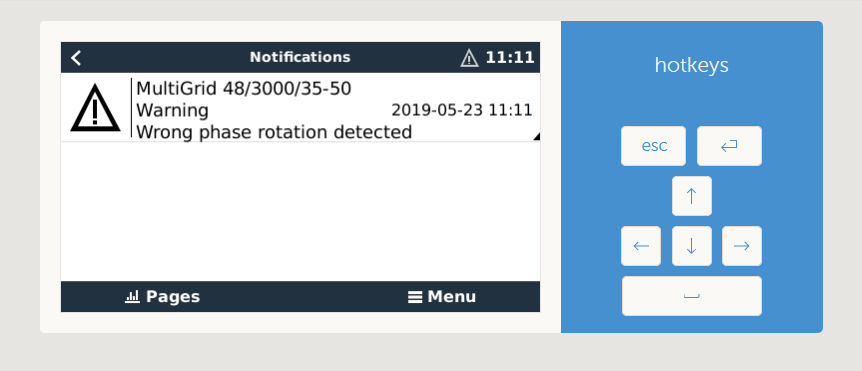
The AC supply, either Generator or Grid, to a three phase inverter/charger system needs to be in the correct rotation, also known as sequence. If not, then the Inverter/chargers will not accept the AC supply and remain in Inverter mode.
The Phase rotation warning will be raised in such case. To resolve the issue, change the wiring on the AC input: swap either one of the phases, effectively changing the rotation from L3 → L2 → L1 to L1 → L2 → L3. Or reprogram the Multis and modify the phase assigned to match the wiring.
On the GX device itself, the warning will be popup as a notification on the GUI:
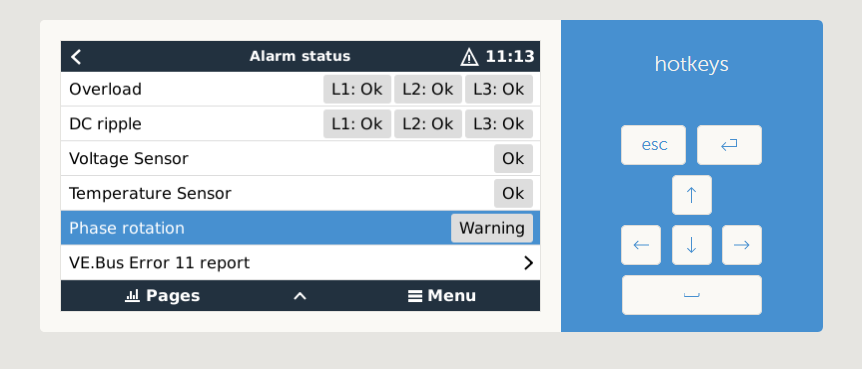
Also, it is visible in the menus:
And on the VRM Portal, it is visible on the VE.Bus Alarms & warnings widget on the Advanced page:
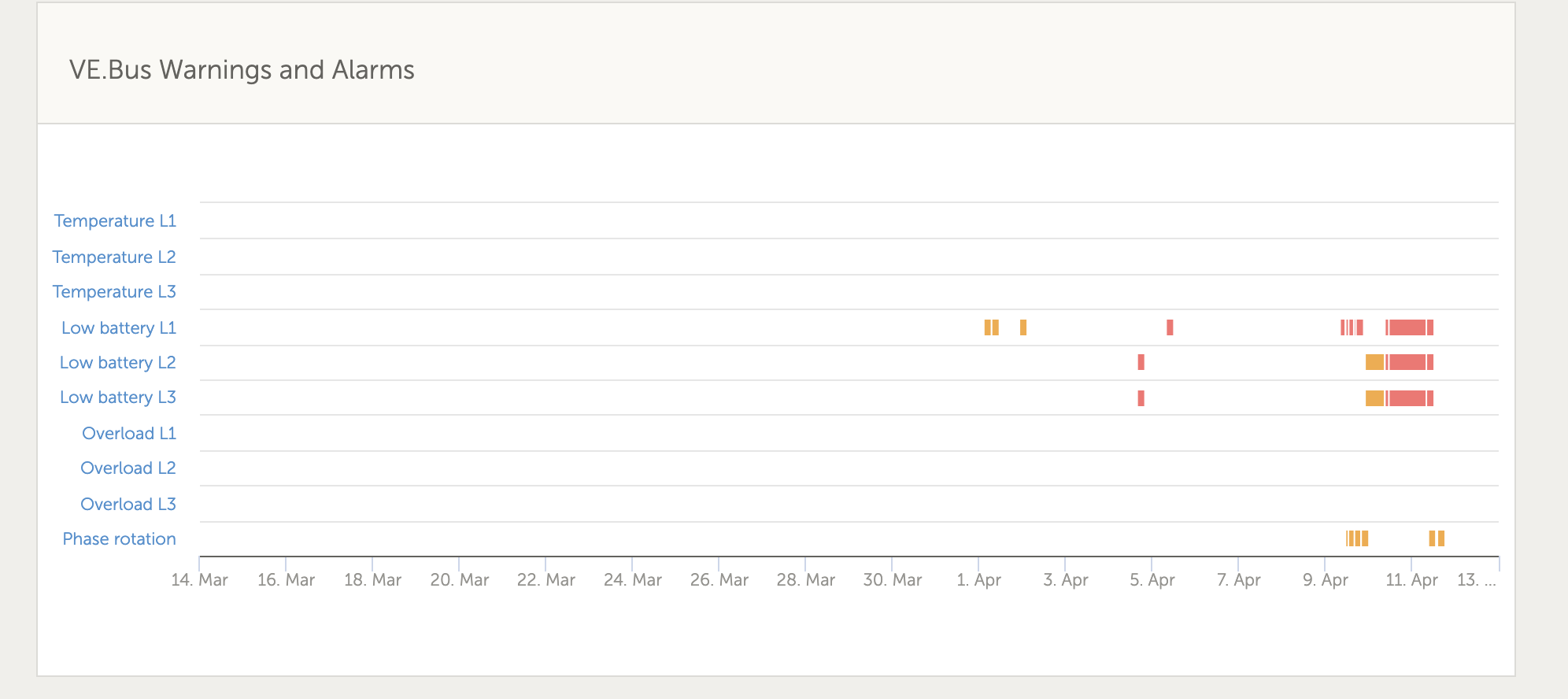
And also it will be listed in the Alarm Log on VRM, and an email will be sent; using the VRM Alarm Monitoring system.
3.3 Grid failure monitoring
When this feature is enabled, an alarm is raised when the system hasn't been connected to the AC input configured to be Grid or Shore for more than 5 seconds.
The alarm shows as a Notification in the GUI, and as an alarm on the VRM Portal, and is available on ModbusTCP / MQTT.
Recommend to use for backup systems. But also for yachts or vehicles on shore power.
Note that this settings monitors that the system is connected to grid/shore. Generator monitoring is already available as part of the Generator start/stop function and not part of this.
Do not use this feature in systems that use the Ignore AC Input settings in our inverter/chargers: when the system ignores the AC input, ie runs in island mode, as intended, even though grid is available, it will report a grid failure.
3.4 Advanced menu
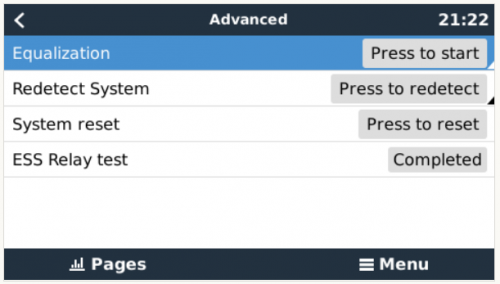
Equalisation
Starts equalisation. See Multi or Quattro documentation for details.
Redetect system
Redetects the type of inverter/charger and its features & configuration. Use this feature when, for example, a VE.Bus BMS used to be part of a system, and is no longer.
System reset
Restarts the inverter/charger when it has stopped retrying. For example after a (very) heavy overload; or three overloads in a row.
ESS Relay test
Shows the status of the ESS Relay test. Only relevant when its an ESS system. See Q9 in the ESS Manual FAQ for details
4 DVCC - Distributed Voltage and Current Control
4.1 Introduction and features
Enabling DVCC changes a GX device from a passive monitor into an active controller. The available features and effects of enabling DVCC depend on the type of battery used. The effect also depends on the installed Victron components and their configuration.
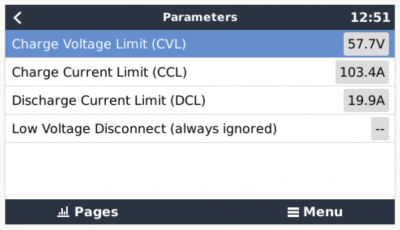
Example 1 - Managed CAN-bus batteries For example, in systems with an Managed CAN-bus BMS battery connected, the GX receives a Charge Voltage Limit (CVL), Charge Current Limit (CCL), Discharge Current Limit (DCL) from that battery and relays that to the connected inverter/chargers and solar chargers. These then disable their internal charge algorithms and simply do what they're told by the battery. There is no need to set-up charge voltages or choose the charge algorithm type.
Example 2 - Lead batteries For systems with lead batteries, DVCC offers features such as a configurable system wide charge current limit, where the GX device actively limits the inverter/charger in case the solar chargers are already charging at full power. As well as shared temperature sense (STS) and shared current sense (SCS).
This table shows the recommend settings for different battery types:
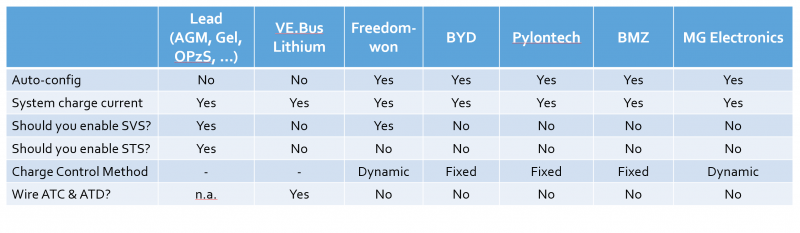
Carefully study below chapters to fully understand DVCC for a particular system.
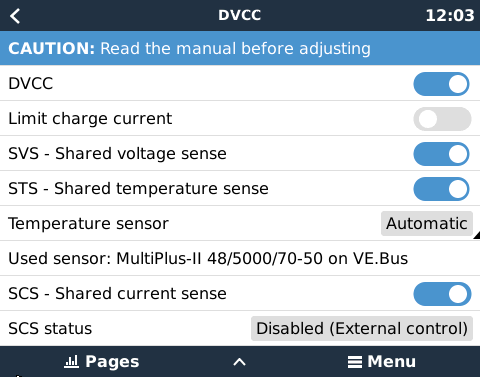
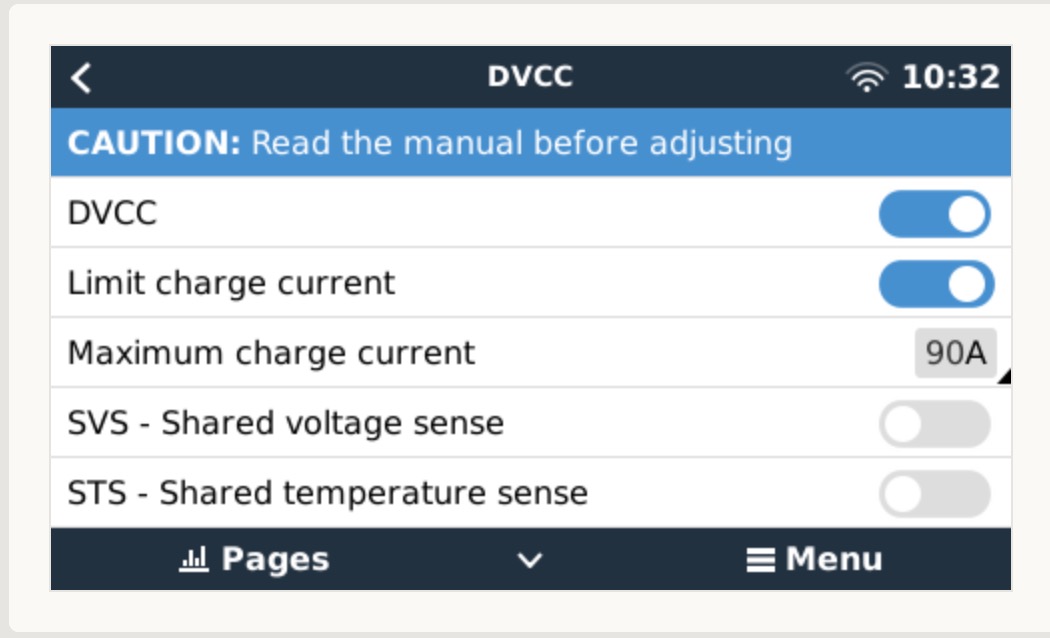
To enable or disable DVCC, see Settings → DVCC in the menus:

4.2 DVCC Requirements
Battery compatilibity
For CAN-bus connected batteries, check the relevant page on the Battery Compatibility manual to see if enabling DVCC has been tested with your battery-type and is supported. If DVCC is not mentioned in notes relating to your battery, do not enable DVCC.
For Gel, AGM, OPzS and other lead batteries, DVCC can be used without any problem. The same is true for Victron Energy lithium batteries with the VE.Bus BMS, the Lynx Ion + Shunt BMS or the Lynx Ion BMS. DVCC is the preferred operating mode for Redflow ZBM2/ZCell batteries using the Redflow CANBus BMS.
Firmware versions
Do not use DVCC in cases where these requirements are not met. In all cases we recommend to install the latest available firmware during commissioning. Once running well, there is no need to pro-actively update firmware without reason. In case of difficulty, the first action is to update firmware.
Required minimum firmware versions:
- Multi/Quattro: 422
- MultiGrid: 424
- CCGX / Venus GX: v2.12
- VE.Direct MPPTs: v1.46
- VE.Can MPPTs with VE.Direct: v1.04
- Older style VE.Can MPPT Solar Chargers (with the screen) cannot be used: they do not support the new control mechanisms.
- Lynx Ion + Shunt: v2.04
- Lynx BMS: v1.09
From Venus firmware v2.40, there will be a warning message 'Error #48 - DVCC with incompatible firmware' when one of the devices has an incompatible firmware while using DVCC.
In case of an ESS System, the ESS Assistant needs to be version 164 or later (Released in November 2017).
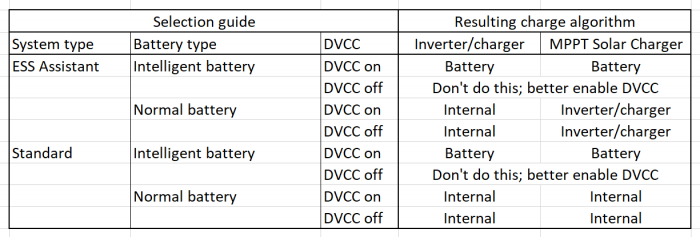
4.3 DVCC effects on the charge algorithm
Our inverter/chargers and MPPT Solar Chargers use their own internal charge algorithm when in stand-alone mode. This means that they determine how long to remain in Absorption, when to switch to Float, when to switch back to Bulk, or Storage. And in those various phases they use the configured parameters in VictronConnect and VEConfigure.
In certain systems, the internal charge algorithm is disabled, and the charger is then working with an externally controlled charge voltage target.
This guide explains the different possibilities:
Internal
The internal charge algorithm (bulk → absorption → float → re-bulk), and the configured charge voltages are active.
Inverter/charger indicated charge state: bulk, absorption, float, and-so-forth.
MPPT indicated charge state: bulk, absorption, float and-so-forth. (firmware version v1.42 onwards. Earlier versions have a bug that make the MPPT say “Ext. Control” when it is only being current limited; its internal charge algorithm still active.
Inverter/charger (applies to MPPTs only)
The MPPTs internal charge algorithm is disabled; instead it's being controlled by a charge voltage setpoint coming from the inverter/charger.
MPPT indicated charge state: Ext. control.
Battery
The internal charge algorithm is disabled; and instead, the device is being controlled by the battery.
Inverter/charger indicated charge state: Bulk when in current controlled mode, Absorption when in voltage controlled mode. Never Float; even though currents might be low / battery might be full.
MPPT indicated charge state: Ext. control.
4.4 DVCC features for all systems
These features apply to all types of systems when DVCC is enabled: with or without ESS Assistant, and with lead or other normal batteries as well as when an intelligent CAN-bus BMS connected battery is installed:
4.4.1 Limit charge current
This is a user-configurable maximum charge current setting. It works across the whole system. MPPT Solar Chargers are automatically prioritized over the mains/generator.
This setting is available in the “Settings → “System Setup” menu on the GX device.
Particulars:
1) In case a CANBUS-BMS is connected and the BMS requests a maximum charge current that is different from the user-configurable setting, the lower of the two will be used.
2) this mechanism only works for Victron inverter/chargers and Solar chargers. Other chargers, such as Skylla-i’s are not controlled and also their charge current is not taken into account. The same applies for devices that are not connected to the GX device, such as an alternator. Worded differently: the total charge current of the inverter/chargers and all MPPTs will be controlled, nothing else. Any other sources will be extra charge current, unaccounted for. Even when installing a BMV or other battery monitor.
3) DC Loads are not accounted for. Even when a BMV or other battery monitor is installed. For example, with a configured maximum charge current of 50 Amps, and DC Loads drawing 20 Amps, the battery will be charged with 30 Amps. Not with the full allowed 50 Amps.
4) Current drawn from the system by the inverter/charger is compensated for. For example, if 10A is drawn to power AC loads, and the limit is 50A, the system will allow the solar chargers to charge with a maximum of 60 Amps.
5) In all situations, the maximum charge limit configured in a device itself, ie. the Charge current limit set with VictronConnect or VEConfigure for the Solar chargers or Inverter/chargers will still be in effect. An example to illustrate this: in case there is only an Inverter/charger in the system, and in VEConfigure is charge current is configured to 50 Amps. And on the GX Device, a limit of 100A is configured, then the working limit will be 50 Amps.
4.4.2 Shared Voltage Sense (SVS)
Works with VE.Bus devices and VE.Direct Solar Chargers.
The system automatically selects the best available voltage measurement. It will use the voltage from the BMS or a BMV battery monitor, if possible, otherwise it will use the battery voltage reported by the VE.Bus system.
The voltage displayed on the GUI reflects the same voltage measurement.
Shared Voltage Sense (SVS) is by default enabled when DVCC is enabled. It can be disabled with a switch in the Settings → System Setup menu.
4.4.3 Shared Temperature Sense (STS)
Select the temperature sensor to use; and the GX device will send the measured battery temperature to the Inverter/charger system as well as all connected Solar Chargers.
Selectable sources for the battery temperature are:
- BMV-702 battery monitor
- BMV-712 battery monitor
- Lynx Shunt VE.Can battery monitors
- Temperature inputs on a Venus GX (and same for other GX devices that have a temperature input)
- Multi/Quattro inverter/charger
- Solar Chargers (if fitted with a temperature sensor)
4.4.4 Shared Current Sense (SCS)
This feature forwards the battery current, as measured by a battery monitor connected to the GX device, to all connected solar chargers.
The solar chargers can be configured to use the battery current for its tail current mechanism that ends absorption when the current is below the configured threshold. For more information about that, refer to Solar charger documentation.
This feature only applies to systems that are not ESS, and/or don’t have a managed battery, since in both of those cases the MPPT is already externally controlled.
Requires MPPT solar charger firmware v1.47 or newer.
4.5 DVCC Features when using CAN-bus BMS Battery
This chapter applies to all systems where an intelligent battery BMS is installed, and connected via CAN-bus. Note that this does not include the Victron VE.Bus BMS.
Such intelligent BMS sends four parameters to the GX device:
- Charge voltage limit (CVL): the maximum charge voltage that the battery currently accepts.
- Charge current limit (CCL): the maximum charge current requested by the battery.
- Discharge current limit (DCL): the maximum discharge current as requested by the battery.
For all three parameters, some types of batteries transmit dynamic values. For example they determine the maximum charge voltage based on cell voltages, state of charge, or for example temperature. Other makes and brands use a fixed value.
Here is the page in the menus showing the parameters:
For such batteries, there is no need to wire allow-to-charge and allow-to-discharge connections to the AUX inputs on a Multi or a Quattro.
When inverting, ie in Island mode, Multis and Quattros will shut down when the max discharge current is zero. They will automatically start again as soon as either AC mains returns, or when the BMS increases the max discharge current again.
See previous chapter, “Limit charge current”, the user setting, for details about how the Maximum charge current is used, how it prioritises solar and more.
All above means that setting up charge voltages or charge profiles in VEConfigure or VictronConnect is not necessary, and will also have no effect. The Multis, Quattros and MPPT Solar Chargers will charge with the voltage as received via CAN-bus from the battery.
4.6 DVCC for systems with the ESS Assistant
- The ESS
Keep batteries chargedmode works properly. It does not without DVCC. - A fixed solar offset of 0.4V is used instead of a variable 2V. (values for 48V systems, divide by 4 for 12V). Note that this solar offset is only applied when
ESS-modeis set toOptimizedin combination with theFeed-in excess solar charger power-setting enabled, or whenESS-modeis set toKeep batteries charged. - Add Auto-recharge feature for the ESS Modes
OptimizedandOptimized (with BatteryLife). The system will automatically recharge the battery (from the grid) when the SOC drops 5% or more below the value of ‘Minimum SOC’ in the ESS menu. Recharge stops when it reaches the Minimum SOC. - ESS improved state display: In addition to the charger states (Bulk/Absorption/Float), additional
DischargingandSustainmodes were added. In addition it also shows reasons for the state it is in:- #1: Low SOC: discharge disabled
- #2: BatteryLife is active
- #3: Charging disabled by BMS
- #4: Discharging disabled by BMS
- #5: Slow Charge in progress (part of BatteryLife, see above)
- #6: User configured a charge limit of zero.
- #7: User configured a discharge limit of zero.
5. VRM Portal
5.1 VRM Portal Introduction
When connected to the internet, a GX device can be used in combination with the Victron Remote Management (VRM) portal, which enables:
- Easy remote access to all statistics and systems status online
- Remote Console on VRM: access and configure your system as if you were standing besides it
- Remote Firmware updates of connected Solar Chargers and other Victron products.
- Use of the VRM App for iOS and Android.
See chapter 1 for how to connect the device to the internet.
5.2 Registering on VRM
Instructions are in the VRM Portal Getting Started document.
Note that any system will need to first have been able to successfully send data to the VRM Portal. As long is there has been no successful connection, it will not be possible to register the system to your VRM user account. In such case, refer to below Troubleshooting section 5.7.
5.3 Datalogging to VRM
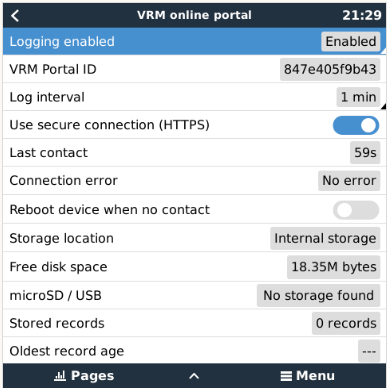
Data-logs are transmitted to the VRM Portal over the Internet, if it's available. All related settings are available in the VRM Online Portal menu:
The transmission of the data logs has been designed to work also on bad internet connections. Lines of up to 70% permenant packet loss are still sufficient to get the data out, even if delayed in some cases.
Adding an external storage device
When unable to transmit the logs, then the GX device will store them to non-volatile storage (ie. data is not lost on a power loss or reboot).
The GX device can store 48 hours worth of logs internally. To extend this period, insert a microSD card or USB stick. You can see the internal storage status in the settings.
Note that, when inserting such storage device, any internally stored logs will automatically be transferred to the inserted stick: no data is lost.
With or without an external storage device inserted, the GX Device will always keep trying to connect to the portal and transmit all backlogged logs. That means that even with months worth of backlog, once it re-acquires an Internet connection, all of the backlog is sent out. The data is sent in a compressed manner: sending a lot of backlogged data will use considerably less bandwidth than than sending the data with a continuously available internet connection.
Storage device requirements
- MicroSD cards or USB flash drives must be formatted as FAT12, FAT16 or FAT32 file systems - and not exFAT or NTFS.
- SD and SDHC type microSD cards of 32 GB capacity and smaller are sold containing FAT12, FAT16 or FAT32. They can be used without a problem, unless they are subsequently re-formatted to a different file system.
- SDXC type microSD cards which have greater than 32 GB capacity are often formatted with exFAT, and therefore cannot be used with the CCGX without reformatting and possibly re-partitioning.
Manually transferring datalogs to VRM
For devices permanently without Internet, it is possible to take the data out, and then upload it manually from a laptop.
- go to Settings → VRM Portal, and click
Eject the storage. Make sure to never just remove the SD-card/USB-stick, this can lead to corruption and data loss. - now, remove the storage device and insert it into a computer or laptop that is connected to the internet.
- open a webbrowser, and navigate to the VRM Portal.
- Login, and then click the 'Upload CCGX File' option, and follow instructions:

- Remove the file from the storage device, and then it re-insert it into the GX Device. Note that uploading the same data twice does not cause any problems; but still it is better not to do that.
With a log interval of once per minute, the required storage space roughly amounts to about 25 MB per month, depending on the number of connected products. So with a 1 GB microSD card, you can store about 3 years of backlog. In other words, any microSD card or USB stick should be sufficient to store the 6 months of data which VRM retains.
When the storage device is full, no more data will be logged.
If multiple storage devices are inserted, the GX device will store the data on the one inserted first. When that is removed, it will not use the other one. Instead, it will create an internal backlog buffer. Only inserting a new one will make it switch to using external storage again.
Network watchdog: auto-reboot
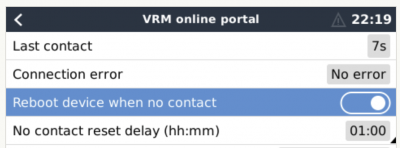
This feature, disabled by default, makes the GX device automatically reboot itself in case it has not been able to connect to the VRM Portal.
Please be careful with enabling this feature on ESS systems: when grid connection is lost, and the GX device reboots, the system can loose power when rebooting takes too long (when grid is present, the Multi's or Quattro's will enter passthru)
5.4 Trouble shooting data logging
This chapter explains what to do when the GX Device cannot transmit data to the VRM Portal.
The communication required to send logs to the VRM Portal is:
- Working DNS
- Proper IP address
- Working internet connection
- Outbound http(s) connection to http://ccgxlogging.victronenergy.com on port 80 and 443. Note that should never be an issue, unless on very specialized company networks.
Note that the CCGX does not support a proxy setup. For more details on the required networking, see here.
Step 1: Update the GX Device to the latest available firmware
Step 2: Verify the network and internet connection
In the menu Settings → Ethernet or Settings → Wi-Fi, check the following:
- State must be ‘Connected’
- There must be an IP address, that does not start with 169.
- There must be a gateway
- There must be DNS servers
For a GX GSM, see the Troubleshooting guide in the GX GSM Menu.
In case the IP address starts with 169, check whether your network has a DHCP server running. 99% of all networks have a DHCP server running and it is enabled by default on all well-known ADSL, cable and 3G routers. If there is no DHCP server running, then configure the ip address manually.
Ethernet

When using Ethernet and State shows 'Unplugged', verify that the Ethernet network cable is not faulty: try another one. The two lights at the back of the CCGX, where the Ethernet RJ45 cable plugs in, should be lit or blinking. Two dead lights indicate a connection problem.
WiFi

When using Wi-Fi and the menu shows 'No Wi-Fi adapter connected' check the USB connection to the Wi-Fi dongle. Try to remove the dongle and insert it again.
When using Wi-Fi and the State shows 'Failure', it might be that the Wi-Fi password is incorrect. Press 'Forget network' and try to connect again with the correct password.
Step 3. Verify VRM Portal Connectivity
Navigate to Settings → VRM online portal, and check the Connection error status:
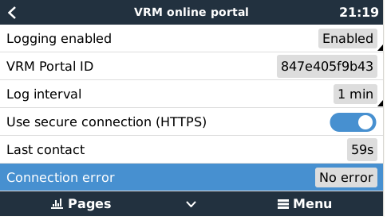
If a Connection error is shown, the CCGX is not able to contact the VRM database. The connection error will show an error code that indicates the nature of the connectivity problem. Also, details of the error message are shown, to facilitate on site IT experts to diagnose the problem.
- Error #150 Unexpected response text: A connection succeeded, but the result was incorrect. This might indicate that a transparent proxy is hijacking the connection. Examples include a WiFi login page or a cellular providers payment page.
- Error #151 Unexpected HTTP Response: A connection succeeded, but the response did not indicate a successful HTTP result code (normally 200). This might indicate that a transparent proxy is hijacking the connection. See #150 above for examples.
- Error #152 Connection time-out: this could indicate a poor quality internet connection, or a restrictive firewall.
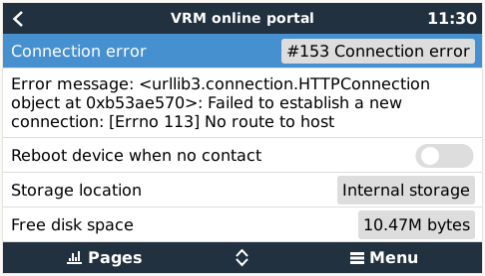
- Error #153 Connection error: this could indicate a routing problem. For details, check the shown error message:
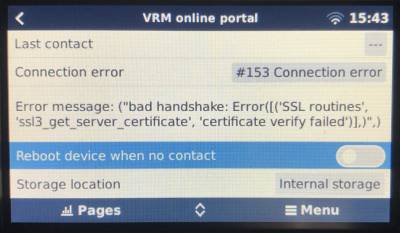
- Error #153 Connection problem, and then specifically an SSL related issue, such as in below screenshot: check the date and time setting of the Gx Device, and also the time zone. And check that your router router is not showing a special disclaimer, login or acceptance page, like often seen in airports, hotels and other public wifi.
- Error #154 DNS Failure: Make sure that a valid DNS server is configured in the Ethernet or WiFi menu. Typically this is assigned automatically by a DHCP server in a network.
- Error #155 Routing error: VRM is unreachable. This error occurs if an ICMP error is received indicating that no route exists to the VRM server. Make sure your DHCP server assigns a working default route, or that the gateway is correctly configured for static configurations.
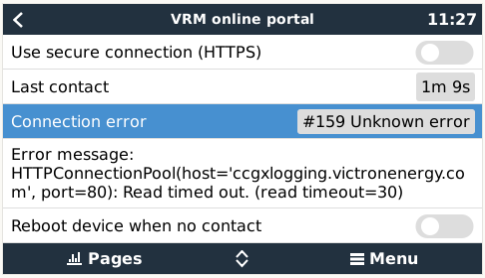
- Error #159 Unknown error: this is a catch-all error for errors that cannot be directly categorised. In such cases the Error message will provide information about the problem.
 .
.

Check 'Last contact'. If this shows dashes, the GX device has not been able to contact the VRM Portal since power up. If it shows a time, but still an error is shown, then the GX device has been able to send data, but has since lost contact.
The 'Buffered items' indicates the number of logs that it has stored to send later. If this is larger than 0, it means that the CCGX can not connect to the VRM Portal. All data is sent using the First in First out principle: the VRM Portal will only show the most up to date information after all old data has been sent.
5.5 Analysing data offline, without VRM
In certain cases, for example for very remote sites where there is no internet available, it can be useful to be able to analyse the data without first having to upload it to the VRM Portal.
- Install VictronConnect on a Windows or Apple laptop
- Insert the storage device containing the log file(s)
- In VictronConnect, use the GX Log Converter feature to convert them to Excel sheets.
5.6 Remote Console on VRM - Setup
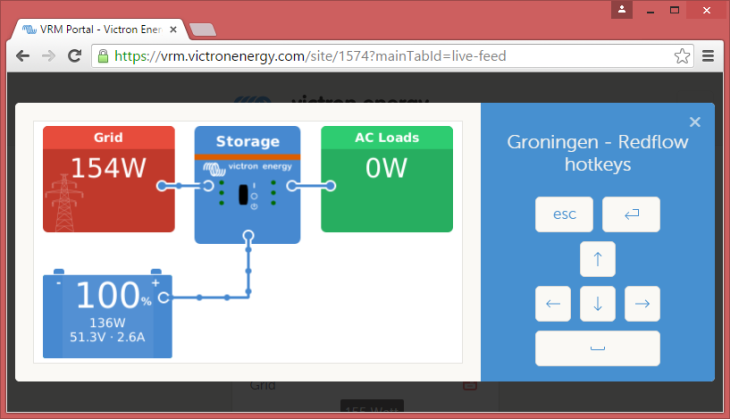
This feature allows full remote control of a GX Device, over the internet:
Remote Console on VRM is disabled by default. Activate it by following these steps:
- Enabling the feature in the Settings → Remote Console menu
- Either set a password; or disable the password
- Restart the GX Device.
Now, the Remote Console option will appear in the menu on the VRM Portal. Click it to open the Remote Console:

5.7 Remote Console on VRM - Trouble shooting
Follow these steps to trouble shoot Remote Console on VRM
- Make sure that Logging to the VRM portal works, see chapter 5.4. Without this; Remote Console on VRM will not work.
- After enabling the Remote Console feature, make sure to have set (or disabled) the password.
- Also make sure to restart the CCGX after setting (or disabling) the password.
- Make sure to update the CCGX to the latest firmware version. The last stability improvement for Remote Console was made in version v2.30.
- After the restart, check the Remote Console on VRM status shows online or a port number. In case it says offline, or port number 0, the CCGX was unable to connect to the Remote Console server. This is normally caused by a (company) firewall, blocking the connection. The solution is then to configure an exception rules in the firewall.
- Verify that your web browser, on which you're using VRM, can access both of below URLs. Click both of the links, to check them. Note that seeing an Error means that all is OK. The good error is 'Error response, Error code 405, Method Not Allowed'. If you get a timeout or another (browser) error, there may be a firewall blocking the connection.
Technical background
To have Remote Console on VRM working, your web browser and the GX Device need to have a connection between them. This connection is designed such that it doesn't need any special configuration or opening up of firewalls in almost all situations. The 0.1% of situations where it doesn't work out of the box are, for example, large corporate networks with special security, or long range expensive satellite or radio supported networks, such as seen in rural areas of Africa and other remote areas.
When Remote Console on VRM is enabled, the GX Device will open and maintain a connection to any of the servers pointed to by supporthosts.victronenergy.com. Which currently resolves to two IP addresses (84.22.107.120 and 84.22.108.49), and likely more in the future. The technology used is ssh, and it will try to connect using port 22, 80 and 443, only one of them needs to work. The reason for it to try all three is that on most networks one of them will be allowed by the local firewall.
Once connected to one the the supporthost servers, that reverse ssh tunnel is waiting to be connected from someone needing the connection. Which can be your browser, or a Victron engineer since this same technology is used for the Remote Support functionality; for more information see above.
When using Remote Console on VRM, the browser will connect to either vncrelay.victronenergy.com, or vncrelay2.victronenergy.com, using websockets on port 443.
For more details of used connections by the GX Device, see Q15 of the FAQ.
6. Marine MFD integration by App
6.1 Introduction & requirements
A Glass Bridge is a MFD (Multi-Functional Display) that integrates a boat’s systems and navigation status into a large screen or screens at the helm of the vessel, so doing away with multiple gauges, brackets and wiring complications.
A Victron system can be easily integrated into that, as shown in this video:
https://www.youtube.com/watch?v=RWdEQfYZKEs
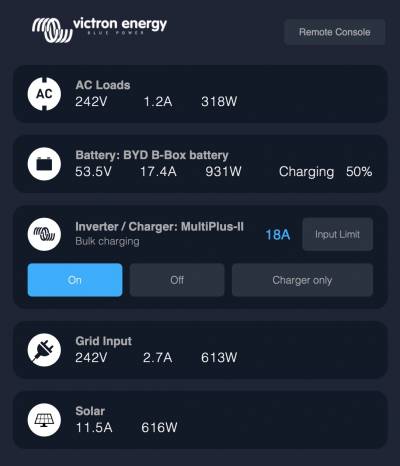
Functionalities:
- Monitor shore power and generator status.
- Monitor battery status for one or more batteries. By using the voltage of for example battery chargers, it can also visualise secondary batteries such as Generator starter batteries.
- Monitor the power conversion equipment: chargers, inverters, inverter/chargers.
- Monitor solar production from an MPPT Solar Charger.
- Monitor AC loads, and DC loads.
- Control shore power input current limit.
- Control the inverter/charger: switch it off, on, or set it to charger-only.
- Optionally open the Victron Remote Console panel; allowing access to further parameters.
Victron equipment compatibility:
- All Victron inverter/chargers: From a 500VA single phase device up to a large 180kVA three phase-system, including Multis, Quattros, 230VAC and 120VAC models.
- Battery Monitors: BMV-700, BMV-702, BMV-712 and newer, Lynx Shunt VE.Can, Lynx Ion BMS.
- All Victron MPPT Solar Charge Controllers
Required components:
- Victron GX Device (all models are compatible: CCGX, Cerbo GX, Venus GX, and so forth)
- Battery system
- Victron Inverter/charger
- Victron Battery monitor
- Ethernet network cable connected between MFD and the GX device
- MFD specific ethernet adapter cable (only for some brands, see detailed information in below links)
6.2 Compatible MFDs and instructions
- Instructions for Navico MFDs (Simrad, B&D, Lowrance)
Furuno: support on Furuno MFDs is in the pipeline. There is no expected date of availability.
6.3 Using the App for other purposes
The App as visible on the MFDs, is a HTML5 App, hosted on the GX Device. It can also be accessed from a normal PC (or a tablet), by navigating to with a browser to: http://venus.local/app/. Or replace venus.local with the GX ip address.
7. Marine MFD integration by NMEA 2000
7.1 Introduction
Our GX Devices feature an NMEA 2000-out function: when enabled, the GX Device acts as a bridge: it makes all Battery monitors, Inverter/chargers and other products connected to je GX device available on the NMEA2000 network.
Using that feature, and having the GX Device connected a NMEA2000 network, Marine MFDs can read this data and visualise it to the user. Often in a highly configurable manner.
Use our VE.Can to NMEA2000 micro-C male cable to connect the GX Device to the NMEA 2000 network.
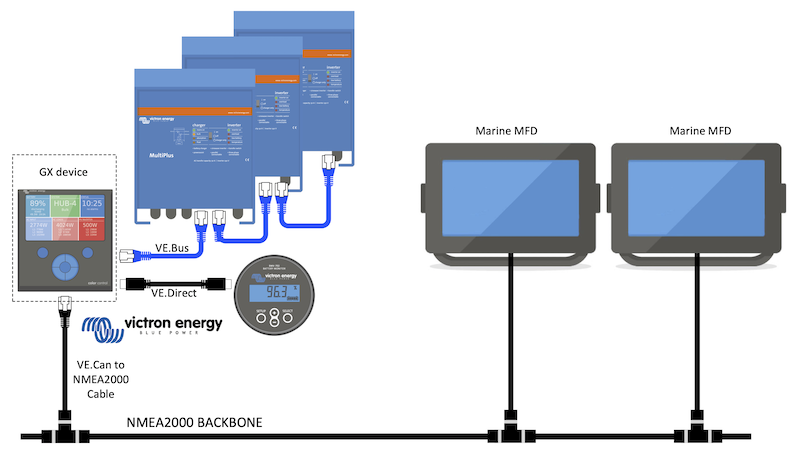
Comparison to the App integration
Compared to MFD integration using the App, as explained in the previous chapter, integration via N2K offers a more customisable configuration. The downside of integration via N2K is that there is more work in making such configuration, as well as making sure all PGNs and fields therein are supported and compatible between the Victron system and the MFD.
More information
Besides this chapter, make sure to also read the introduction blogpost, as well as our main Marine MFD Integration document.
7.2 Supported devices / PGNs
NMEA 2000 defines several messages. Messages are identified by their parameter group number (PGN). A textual description of the message is publicly available on the NMEA 2000 website (http://www.nmea.org/).
Detailed specification of the protocol and message definition or part thereof can be ordered online on the NMEA 2000 website.
NMEA 2000 is based on and compatible with SAE J1939. All AC information messages are in the AC status message format as defined in J1939-75. The specification of these messages can be bought on the SAE website (http://www.sae.org/).
For a detailed list of PGNs, please refer to our data communication whitepaper.
Inverter/chargers
All inverter/chargers that connect using a VE.Bus port are supported. This includes Multis, Quattros, MultiPlus-IIs, and other (similar) Victron inverter/chargers.
Data is transmitted out; and its possible to set shore current as well as switch the inverter charger on, off, inverter only and charger only.
The interface has two functions:
- The function, “153 Inverter”, represents the AC-output
- The function “154 AC Input” monitor represents the AC-input
Charger Status messages will be sent by the Inverter function. Both functions have their own network address.
Since both functions transmit the same PGNs, for example an AC Status PGN containing voltage, current and more information, NMEA 2000 data consumers like generic displays will need to be able to make a distinction based on the network address. Depending on the function belonging to that network address the need to interpret it as either Inverter Input or Inverter Output. Displays not being capable of doing so will regard the data as belonging to the mains (utility). The Inverter Output is then interpreted as utility #0 and Inverter Input as utility #1. These default instance numbers can be changed by a network configuration tool if necessary.
Inverters
Only VE.Bus type inverters are supported: any Inverter connected using VE.Direct is not (yet) made available on the N2K bus.
Battery monitors
Supported. This includes any battery monitor as supported by the GX Device.
Other data and product types
Not supported. Above are the only now supported types. For example tank levels are not yet transmitted out on N2K, nor is any data from a charger (such as the Phoenix Smart Charger connected via VE.Direct), and neither is data from solar chargers.
7.3 Related menu settings
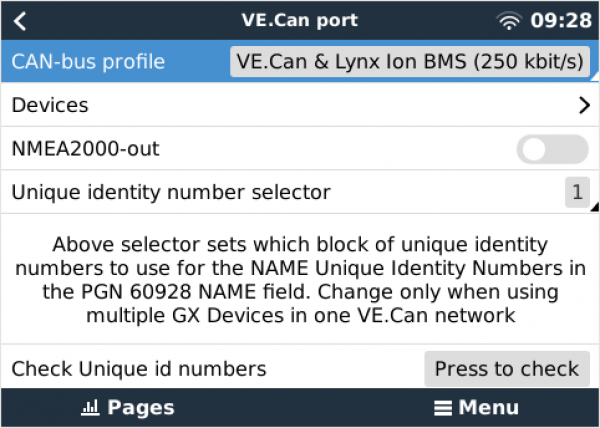
| Setting | Default | Description |
|---|---|---|
| CAN-bus Profile | VE.Can | Defines the type & baudrate of the CAN-bus network. To use in combination with NMEA2000, make sure to choose one of the profiles that include VE.Can and is at 250kbit/s |
| Send data to VE.Can | Off | Enables and disabled the NMEA2000-out function |
| Unique device number | 1 | Selects the block of numbers to use for the NAME Unique Identity Numbers in the PGN 60928 NAME field. For the GX Device itself, and when NMEA2000-out is enabled, also for the virtual-devices. Change it only when installing multiple GX Devices in the same VE.Can network. There are no other reasons to change this number. |
| Check unique numbers | Searches for other devices that use the same unique number. When the search is completed it will respond with either an OK, or the text There is another device connected with this unique number, please select another one.. Note that there is normally no reason to use this function: the GX Device automatically and continuously checks uniqueness of the numbers in use, and will warn when in case there is a conflict. This setting is made available to quickly confirm that everything is OK after changing the setting. |
7.4 NMEA2000-out technical details
7.4.1 Glossary
To make this text good to interpret, here is a glossary of used terms:
- Virtual-device: a Battery Monitor, Inverter, or other Victron device that does not have a CAN-bus port by itself, made available “virtually” on the CAN-bus by the NMEA2000-out function of the GX Device.
- CAN-bus: the VE.Can port on the GX Device, that, in the context of this chapter, is most likely connected to a NMEA2000 network.
- NMEA2000-out function: the software feature in the GX Device, which is described in this chapter.
- NMEA2000: Marine CAN-bus protocol, based on J1939.
- Instance: there are many types of instances, and explained in detail below.
- J1939: A set of standards defining a CAN-bus protocol, defined by the SAE organisation.
- Address Claim procedure (ACL): a mechanism, specified by J1939 and used in NMEA2000, which used by devices on the network to negotiate and assign each device on the network a unique network addresses. Its is a number from 0 to 252. There are three special network addresses defined:
- 0xFD (253) - Reserved
- 0xFE (254) - Unable to claim address - for example when all others are in use
- 0xFF (255) - The broadcast address
7.4.2 Virtual-devices
When the NMEA2000-out feature is enabled, the GX Device acts as a bridge: it will make each Battery monitor, Inverter/charger or other device that is connected, available individually on the CAN-bus.
Individually, as in each with its own network address, its own device instance, function codes, and so forth.
For example, a GX Device with two BMVs connected on a VE.Direct port and an inverter/charger connected using VE.Bus, will make the following data available on the CAN-bus:
| Address | Class | Function | Description |
|---|---|---|---|
| 0xE1 | 130 (Display) | 120 (Display) | The GX Device itself |
| 0x03 | 35 (Electrical generation) | 170 (Battery) | The 1st BMV |
| 0xE4 | 35 (Electrical generation) | 170 (Battery) | The 2nd BMV |
| 0xD3 | 35 (Electrical generation) | 153 | The inverter/charger (AC-output) |
| 0xD6 | 35 (Electrical generation) | 154 | The inverter/charger (AC-input) |
The used network addresses are random examples. Network addresses can change due to the J1939/NMEA2000 Address Claim Procedure (ACL), and they are not and cannot be configured to a permanent value. Even though they might seem fixed, when checking with a NMEA2000 monitoring tool, adding or replacing devices from the system might lead to changes in the network addresses.
7.4.3 Classes and functions
As per NMEA2000 specification, these define the types of senders and devices connected to the CAN-bus. Classes are the main categories, and functions specify it to a further detail.
7.4.4 Instances
NMEA2000 defines three different instances:
- Data instance
- Device instance
- System instance
For all Battery monitors and other devices that the GX Device makes available on the CAN-bus, each of above types of instance is available, and can be individually configured. Per virtual-device, there is one Device instance and one System instance. And depending on the type of the virtual-device, there are one or multiple Data instances. For example, for a BMV-712 there are two data instances, one “DC Instance” for the main battery, and another one for the Starter battery voltage.
How to configure the instances depends on the equipment and software that is used to read them from the CAN-bus. Examples of equipment and software meant here are MFDs such as from Garmin, Raymarine or Navico; as well as more software oriented solutions from for example Maretron. Most, or hopefully all, of those solutions identify parameters and products by requiring unique Device instances, or using the PGN 60928 NAME Unique Identity Numbers. They do not rely on the data instances to be globally unique.
The NMEA2000 specification specifies the following: “Data instances shall be unique in the same PGNs transmitted by a device. Data instances shall not be globally unique on the network. Field programmability shall be implemented through the use of PGN 126208, Write Fields Group Function.”. In other words, data instances need to be unique only within a single device. There is no requirement for them to be globally unique – the only exception is “Engine Instance” that at least for now, to cope with legacy devices, needs to be globally unique (e.g. Port = 0, Starboard = 1). For example, some of our BMV Battery monitors can measure two voltages, one for the main battery, and one for the starter battery, and thats where data instancing is used. Similar for multiple-output battery chargers. Note that there is no need for the installer to change those data instances, as those products are pre-configured to transmit the relevant PGNs with unique data instances (Battery instance & DC Detailed instance, in this case).
WARNING: whilst it is possible to change the data instances, changing them on a Victron devices will render that device impossible to read correctly by other Victron devices.
A note about the Device instances: it is not necessary to assign a unique device instance to each device on the CAN-bus. Its no problem for a battery monitor and a solar charger to both be configured with (their default) Device instance 0. Also when having multiple battery monitors or solar chargers, it is not always necessary to assign each of them a unique device instance. If at all necessary, they only need to be unique between the devices that use the same Function.
And note that changing the Device instance on a Victron device can change its operation, see below.
System instances
As per NMEA2000 specification, this instance is a 4-bit field with a valid range from 0 to 15 that indicates the occurrence of devices in additional network segments, redundant or parallel networks, or sub networks. The System Instance Field can be utilized to facilitate multiple NMEA 2000 networks on these larger marine platforms. NMEA 2000 Devices behind a bridge, router, gateway, or as part of some network segment could all indicate this by use and application of the System Instance Field.
The ECU instance and Function instance
In some documentation and software tools, yet other terminology is used:
- ECU Instance
- Function Instance
- Device Instance Lower
- Device Instance Upper
Here is how they all relate: the ECU Instance and Function Instance terminology originates from the SAE J1939 and ISO 11783-5 specification. And they do not exist in the NMEA2000 definition. However, they all do define the same fields in the same CAN-bus messages which NMEA2000 defines as Device instance.
In more detail: the field that J1939 defines as ECU Instance is in the NMEA2000 specification renamed to Device Instance lower. The Function Instance is renamed to Device Instance Upper. And together they form the Device Instance, an NMEA2000 definition.
While using different terms, those fields are the same fields in both standards. Device Instance Lower being 3 bits in length, and Device Instance Upper 5, together 8 bits. Which is the one byte being the NMEA2000 Device Instance.
The Unique Instance
The Unique Instance is one more word used to describe almost the same information. Its used by Maretron, and can be made visible in their software by enabling the column. The Maretron software itself chooses (?) between Device Instance and Data Instance.
7.4.5 Changing Instances
Data instance
Data instances cannot be changed -at least- at Victron we do not provide a means to do so and also we don't know of any other available tool that allows changing Data instances. Note that as explained above under the WARNING, we also recommend to not change a data instance; since then the information cannot be properly read any more by other Victron devices.
On a more technical note, our products do support to have their data instances changed, by using the CAN-bus messages specified to do so as per NMEA2000 documentation (so called “complex write commands”).
Device instance
To change the Device instances, see this document.
WARNING: these (Victron-)features depend on the Device Instance:
- For an ESS system with Solar chargers connected on a VE.Can network, those Solar chargers must remain to be configured to their default Device instance (0) for proper operation. This does not apply to VE.Direct-connected Solar Chargers made available on the CAN-Bus as a Virtual-device, using the NMEA2000-out function. Unless the Device instance of the GX Device is re-configured to another Device Instance. Which is technically possible but not advised and also never required. But in that situation the chargers must be configured to the same instance as the GX Device.
- For systems with managed batteries, the same.
- For both Solar chargers, as well as AC-Connected battery chargers, when connected in a VE.Can network, they will synchronise their operation. Charge state and such. For that function to work, all chargers must be configured to the same device instance.
In summary, for the majority of systems we recommend to leave the Device instance to its default, 0.
7.4.5 PGN 60928 NAME Unique Identity Numbers
The GX Device will assign an individual Unique Identity Number to each virtual-device. The number assigned is a function of the PGN 60928 NAME Unique Identity Number block aka Unique device number for VE.Can as in above screenshot, as configured in the settings of the GX Device.
This table shows how changing that setting translates into the virtual-devices as made available on the CAN-bus:
| configured Unique Identity block: | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| GX Device | 500 | 1000 | 1500 | 2000 |
| 1st virtual-device (for example a BMV) | 501 | 1001 | 1501 | 2001 |
| 2st virtual-device (for example another BMV) | 502 | 1002 | 1502 | 2002 |
| 3st virtual-device (for example a third BMV) | 503 | 1003 | 1503 | 2003 |
8 Error Codes
Different origins of errors
On your GX device, some error codes shown will be from the GX device itself, in that case see below list. But since its the system control panel, it also shows error codes from the connected devices.
- Multi and Quattro inverter/chargers: VE.Bus Error Codes
- MPPT Solar Chargers: MPPT Solar Charger Error Codes
GX Error #42 - Storage corrupt
This error means that the flash memory inside the GX Device is corrupt.
The device must be sent in for repair/replacement. Its not possible to correct this issue in the field or with a firmware update.
The affected flash memory is the partition that holds all user settings and factory data, such as serial numbers and wifi codes.
GX Error #47 - Data partition issue
The internal storage in the GX Device is most likely broken: causing it to loose its configuration.
Contact your dealer or installer; see www.victronenergy.com/support
GX Error #48 - DVCC with incompatible firmware
This error is raised when the DVCC feature is enabled whilst not all devices in the system are updated to recent enough firmware. More information about DVCC and minimal required firmware versions in chapter 4 of this manual.
Note for systems with BYD, MG Energy Systems, and Victron Lynx Ion BMS batteries:
Since Venus OS v2.40, released in December 2019, the DVCC feature is automatically switched on in case the systems detects one of mentioned battery/BMS types connected. And it is not possible to switch DVCC off in that case.
This creates an issue for systems installed and commissioned a long time ago, from before DVCC was available and later due to mandatory work for such systems.
The solution is to:
- Disable automatic updates; Settings → Firmware → Online updates.
- Roll back to v2.33; See Settings, Firmware and then Stored backup firmware.
- Make sure that DVCC is disabled again.
Please do consult your installer, to check if the battery system is managed with two wire control (no DVCC needed) or not:
In case there is no charge- and discharge- wiring between BMS, inverter/chargers and charge controllers, then DVCC is required for the above mentioned battery brands, and this also has certain minimum firmware requirements for connected Inverter/Chargers and Solar Charge Controllers.
Whats new since Venus OS v2.40 is (a) that it automatically enables DVCC when it sees the above mentioned battery types, and (b) that when DVCC is enabled, it checks the connected devices for the minimum firmware, and raises Error #48 in case the firmware of one or more connected devices is too old.
9 More information resources

DISQUS
~~DISQUS~~